基于超稳定理论设计的控制系统及其仿真
摘 要:本文针对一类实际工业受控对象的增益呈现缓时变的情况,采用了一种基于超稳定理论设计的自适应控制方案。通过对其在Matlab之Simulink中进行仿真,结果表明此方案可有效地抑制缓时变对系统性能的影响.
关键词: 超稳定理论设计; 模型参考自适应; 仿真
1.引言
模型参考自适应控制系统(MRACS),其设计性能指标是以参考模型的形式来表示的,因此简单直观,符合工程实践,并且有着多种设计方法.本文是用稳定性设计方法中的波波夫超稳定理论对可调增益模型参考自适应控制系统进行探讨,先从理论方面人手推导出系统的自适应律,再利用仿真加以验证.
2.自适应律的推导
2.1 具有可调增益的系统
可调增益模型参考自适应控制系统结构如图1所示。
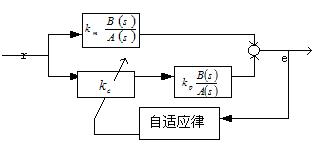
图1 可调增益模型参考自适应控制系统结构示
2.2
已知:给定对象Wp(S),参模Wm(S);任务:用波波夫超稳定理论找K&c,使Yp=Ym 可得出e=0。
2.3 设计的方法和步骤
非线性反馈闭环系统结构如图2所示
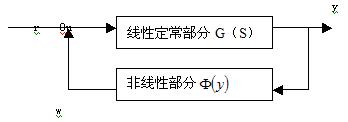
图2 非线性反馈闭环系统结构图
2.3.1 列数学模型方程(以二阶为例)
列出数学模型,建立等效误差系统

2.3.2 求等价的非线性闭环系统
变换误差系统方程为等价的非线形反馈系统,其中线形环节位于正向通道,非线形环节位于反馈通道
① 自适应控制规律的一般形式为
![]() (4)为了满足1 .反向通道满足波波夫不等式 2.正向通道满足正实的两个条件所设计的模型为图3所示:
(4)为了满足1 .反向通道满足波波夫不等式 2.正向通道满足正实的两个条件所设计的模型为图3所示:
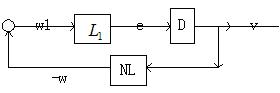
图3 等价非线性闭环系统
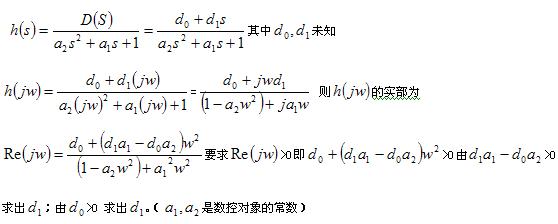
② 设线性块:![]() (5)
(5)
所以线性块函数(前向通道)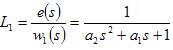 (不是正实数),为了前向通道为严格正实,串入一补偿块D,其输入为e输出为V
(不是正实数),为了前向通道为严格正实,串入一补偿块D,其输入为e输出为V![]()
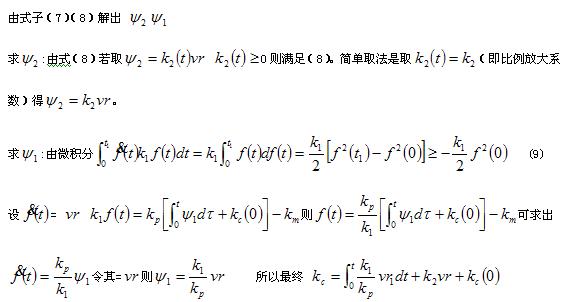
③ 使反馈块的输入,输出满足波波夫不等式(既 NL要满足的)
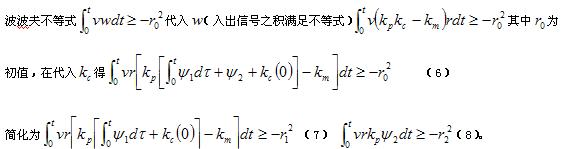
2.3.3求D(比例微分)
按POPOV定理:使正向通道具有(严格)正实,使非线形环节满足POPOV不等式
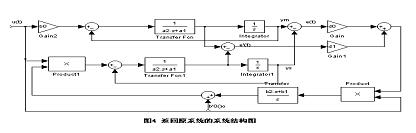
2.3.4返回原系统求自适应律
从等价非线形返回原系统,如图4 所示
3.系统仿真
假设二阶系统的模型为![]() 由超稳定理论可以构造出下图5所示的系统的simulink模型,通过改变自适应控制的增益b(t),使得系统的输出可以跟踪参考模型的输出。输入信号为方波信号且其幅值为10,频率为1并将仿真范围设置为0~15秒,若参数b0=0.5,a1=0.447,a2=0.1,且选择控制器参数d0=0,d1=0.5,k1=0.03.k2=1,若取b01=0.2则可进一步再调整系统模型a3参数,使之在0.02,0.1(=a2),1,2,5,10的范围内变化.
由超稳定理论可以构造出下图5所示的系统的simulink模型,通过改变自适应控制的增益b(t),使得系统的输出可以跟踪参考模型的输出。输入信号为方波信号且其幅值为10,频率为1并将仿真范围设置为0~15秒,若参数b0=0.5,a1=0.447,a2=0.1,且选择控制器参数d0=0,d1=0.5,k1=0.03.k2=1,若取b01=0.2则可进一步再调整系统模型a3参数,使之在0.02,0.1(=a2),1,2,5,10的范围内变化.
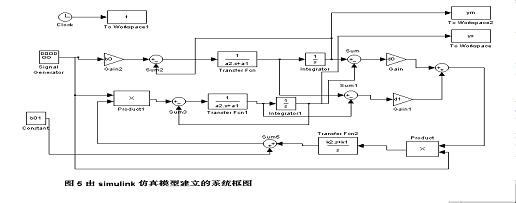
仿真结果 :如图6.7所示
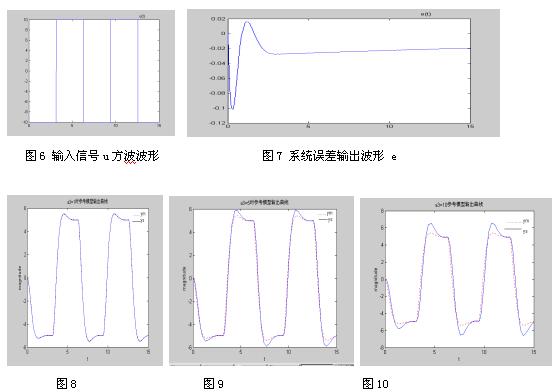
图8.9.10分别为a3取不同值时的参考模型输出(ym),可调系统的输出波形(ys)。
从所得的仿真曲线可看出,其中幅值趋于最小的为参考模型的输出曲线,随着a3值的增大,自适应控制的效果变差,但始终保持在可以接受的范围内。保证了系统的输出跟踪参考模型的输出。
4. 结束语
相关推荐
