基于DSP的摆式列车测控系统研制
摘 要:介绍了以TMS320 C40数字信号处理器(Digital Signal Processor,简称DSP)为核心的摆式列车倾摆控制系统。给出了摆式列车倾摆控制系统中线路检测子系统、控制子系统、通信子系统的功能及原理,并介绍了车辆倾摆控制算法。
关键词:数字信号处理器;摆式列车;检测;倾摆控制
理论分析和国外实践表明,要提高列车的曲线通过速度,唯一的途径就是采用摆式列车,以补偿由于曲线超高不足而对曲线通过速度的限制。中国多山且既有线路的等级一般较低。因此,开发具有自主知识产权的摆式列车已成为铁路提速的当务之急。摆式列车的基本设计思想是在实际线路超高一定的情况下,列车以高出曲线设计速度通过曲线时,会出现未平衡离心加速度,通过对摆式列车运行中横向加速度及轨道超高等状态参数的检测和处理,得到列车运行时的剩余离心加速度,经过数据处理,形成控制指令,通过倾摆控制系统,使列车各车辆在通过曲线时向轨道内侧倾摆一定角度,相当于使既有线路在固有超高基础上再增加一份超高,利用车辆重心发生偏移来消除剩余离心加速度,使列车在高速运行中安全通过曲线。
在整个摆式列车系统中,对列车的状态信息测量及倾摆控制是一个关键问题,关系着列车能否安全运行。因而摆式列车倾摆控制系统必须能够对上述参数实现快速、准确的测量并对其作出实时处理。DSP是一种特别适合于数字信号处理运算的微处理器,主要应用实现各种数字信号处理算法,其处理速度快,精度高,易于扩展成摆式列车的倾摆控制系统。
1 DSP技术
DSP(Digital Signal Processor)是数字信号处理器的简称,特别适合进行数字信号处理(Digital Signal Processing)。DSP芯片是80年代以后才发展起来的产品,DSP真正广泛的应用是从TI(Texas Instruments)公司的TMS320系列问世开始的。DSP作为数字信号处理应用,采用特殊的硬件结构和专用数字信号处理的指令系统:
(1)采用改进的哈佛结构(Harvard structure)
哈佛结构不同于传统的诺曼(Neuman)结构,程序和数据具有独立的存储空间,并有各自独立的总线。改进之后,数据总线和程序总线之间交叉连接,允许数据存放在程序存储器中并可以直接调用,还可使指令存储在高速缓存器(Cache)中。这种结构大大地提高了处理器的运行速度。
(2)DSP指令系统是流水线操作
DSP指令系统的流水线操作是与哈佛结构相配合的。流水线操作中,DSP可以同时并行处理2~4条指令,增加了处理器的处理能力,同时把指令周期减小到最小值。C40具有4级深度的流水线。
(3)采用专用的硬件乘法器
一般微处理器只能完成两个操作数的加、减及逻辑运算,而乘法(除法)只能由加法和移位来实现。而在数字信号处理的许多算法(FFT和FIR等)中,需要做大量的乘加运算。而DSP中包含了专用的硬件乘法器,一次乘累加最少可在一个周期内完成。这样就大大地提高了数字信号处理的速度。
(4)特殊的DSP指令
DSP器件的又一个特点是拥有一套专用的指令系统和寻址方式。如为实现快速傅里叶变换的蝶形运算而专门设计的位翻转寻址方式。
DSP技术随着信息和网络时代的到来应用越来越广泛,涉及到方方面面,如图像处理、导弹控制、雷达信号处理、导航、蜂窝移动电话、数字滤波、模式识别、机器人控制、语音处理、电力线监控、通信系统和全球定位等等。文中采用了TI的DSP芯片TMS320C40来作为测控系统的核心。C40是TI公司的32位浮点数的数字信号处理器。其运算速度为275MOPS(百万次/s),320MB/s的数据流量,它是真正支持并行操作的数字信号处理器。
2 测控系统功能及组成
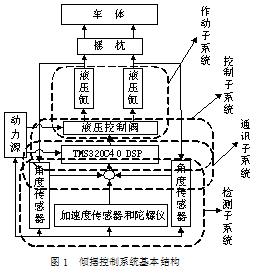
摆式列车倾摆控制系统通过实时检测列车通过曲线时所承受的未平衡离心加速度,根据各车辆在列车编组所处位置及运行速度,计算出车辆抵消此未平衡加速度所必须的倾摆角度,并通过列车通信网络将此倾摆角度传送给各车辆,各车辆中的倾摆作动系统根据指令完成相应的车辆倾摆动作,保证各车辆在进入曲线后能够及时倾摆,抵消未平衡加速度的影响,提高乘坐舒适性。因此,摆式列车倾摆控制系统基本上由线路检测子系统、控制子系统、通信子系统及倾摆作动子系统4个部分组成,本文主要介绍前三者。系统结构如图1所示。
2.1 线路检测子系统
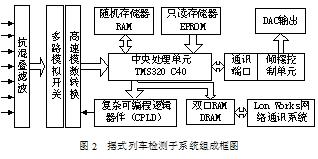
目前世界上对摆式列车一般采用线路预置和直接实时采集两种模式。文中所说的是直接实时采集式,该方式是通过实时采集列车运行的加速度或离心力来控制车辆的倾摆角。这种控制方式的最大优点是不必在每一曲线处设置应答器,摆式列车可在任何线路上运行,适用范围广。如图2所示,该测控系统由4部分组成:抗混滤波器组、模数转换、中央处理单元、通信与倾摆控制单元。
(1) 抗混滤波
为了消除各种随机振动对横向未平衡加速度信号的影响,必须对加速度传感器测出的信号进行滤波处理。由于车辆本身几个主要振型的固有频率在1~10Hz的范围内,从而消除横向振动部分的低通滤波器的截止频率范围一般为0.5~1Hz。加速度信号在经过低通滤波器处理之后,会产生较大的滞后,时间一般在0.8s左右,因而在测控系统中,需要用陀螺仪对滤波输出的信号加以补偿。
(2) 中央处理单元
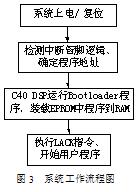
该单元的核心是数字信号处理器TMS320 C40,如图2所示。在系统中,TMS320C40工作在微计算机方式下,数据处理程序下载到系统中EPROM中。当系统上电时,TMS320 C40根据中断管脚的逻辑电平来确定程序的物理空间,执行内部的BootLoader程序,把EPROM中的程序转载到RAM空间,并从指定地址开始运行检测程序。系统工作流程如图3所示。可编程逻辑器件(CPLD)在整个测控系统中取代传统的分离逻辑器件,在一个芯片上实现地址信号译码,模数转换时序等功能。在CPLD的控制下,模数转换器件连续不断地对16路模拟信号进行转换。每次转换完成后,交于TMS320 C40处理,产生倾摆指令,通过通信端口送入倾摆控制单元。
2.2 控制子系统
控制子系统主要由控制计算机构成,位于机车驾驶室内,其主要任务是完成车辆倾摆控制以及整个倾摆控制系统网络的管理。具体功能如下:
(1)根据检测系统所提供的信息,实时计算出列车各车辆所需要的倾摆控制指令,并把控制指令下发到各车辆。
(2)负责整个倾摆控制网络的管理和维护。
(3)整个控制网络的故障诊断。
(4)完成MMI的指令和显示。
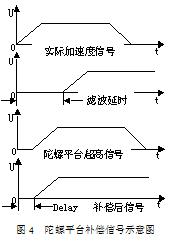
位于头车和尾车分别有两台计算机,列车在运用中无须调头,在两个方向运行时分别由两台计算机控制。主控制计算机采用TMS320 C40高速数字信号处理器为CPU,具有强大的数字信号处理功能,主要完成倾摆控制指令的计算生成。由前述可知,测出的信号在经过低通滤波器处理之后,会产生0.8秒左右的滞后,如果列车以160km/h速度运行,0.8秒意味着列车已运行了35米,加上机械部件的延迟,将使编组中的第一、二节车不能在进入缓和曲线时实施倾摆。因此为保证及时倾摆,还必须采用陀螺仪对滤波输出的信号加以补偿。如图4所示。控制计算机根据陀螺仪提供的列车进出曲线触发信号及运行速度等信息,可以向第一节车辆预先发出倾摆指令,使其在进入曲线时能够及时倾摆。对于其它车辆,控制计算机根据列车运行速度和各车辆在编组中的位置,计算出每节车辆的倾摆角度,通过通信子系统发给各车辆的倾摆控制计算机。
2.3 通信子系统
倾摆指令是一组时序数据,为了保证车辆平稳倾摆,要求传送指令给倾摆作动子系统的通信子系统具有较高的实时性。通信系统的可靠性直接关系到倾摆系统及列车运行安全。因此选用工业上技术成熟的测控网络进行列车的通信系统开发,可大大减少开发周期,同时保证了通信系统的可靠性。文中选用目前工业现场控制领域比较流行的测控网络Lon works技术作通信系统,它符合IEEE铁路运输车辆接口标准委员会制定的用于车载数据通信的P1473-1999L标准,是一种多功能、开放的、互操作的控制网络协议。
(1)Lon works网络的特点
神经元芯片,具备通信与控制功能,固化OSI的全部7层通信协议以及34种I/O控制对象;改善了CSMA,网络负载很重时,网络不会瘫痪;采用了面向对象的设计方法,节省了设计工作量,增加了通信的可靠性;每帧有效字节数可以从0到228个字节;通信速度可达1.25Mb/s(有效距离130m);一个测控网络的节点可达32000个;通信介质非常广泛。
(2)Lon works通信方式
Lon works网络有四种通信方式:确认方式、请求/响应方式、重复和非确认重复方式、非确认方式。报文服务方式有:请求/响应式服务;端到端的确认服务方式等多种。
(3)通信网络试验
对基于Lon works的通信系统进行了实验室试验及线路运行试验。采用100m弱5类双绞线在进行了16小时连续试验,总共传输8000031个数据包而没有丢失一个包,网络平均每秒传送数据包160个左右,平均每个数据包容量11.6个字节,频宽利用率65%。在实验室的牵引机车及试验车上安装该网络模拟两动一拖车组在学校专用线路上进行了线路运行试验。1小时的试验过程中,两车之间共传输520000个数据包,没有丢失一个数据包,运行效果良好,达到了最初设计要求。表1列出了在试验车上的运行试验结果。

3 结语
相关推荐