柴油机转速模糊控制的一种算法及其实现
摘 要: 针对柴油机数字式电子调速器的特点,设计了一种转速模糊控制算法,并在以16 位嵌入式单片机为核心的柴油机数字调速系统中实现了这种算法. 实机试验结果表明,这种算法有较好的控制效果.
关键词: 柴油机; 数字调速; 模糊控制
在柴油机数字调速系统中,传统的PID 控制具有算法简单、易于实现等优点,对于在某一固定转速下工作的柴油机(如电站工况) 具有很好的控制效果. 但对于柴油机主动力装置,仅采用PID 控制很难实现在整个转速范围内都达到良好的动态和静态性能. 在PID 控制的基础上,结合自适应控制等现代控制理论是解决柴油机非线性时变问题的有效手段. 但这些控制策略需要建立被控对象精确的数学模型或需要对模型进行实时辨识,算法复杂、运算量大,在以微控制器为硬件核心的数字电子调速器中难以实现. Fuzzy logic cont rol (FLC) 不依赖被控对象的数学模型,鲁棒性好、动态性能优良,是解决柴油机转速控制系统非线性时变问题的合适控制方案。但由于柴油机转速控制系统的复杂性且在微控制器中难以实现高性能的模糊控制规律,迄今为止,国内对柴油机转速模糊控制的研究多处于仿真阶段.
本文在设计以Intel80C196 嵌入式16 位单片机为核心的柴油机数字调速系统时,研究了柴油机数字调速系统中单片机模糊控制的实现技术问题,设计了一种具有较好控制效果且微处理器性能可以承受的模糊控制算法.
模糊控制在微控制器中的实现方式
在微控制器中实现模糊控制一般采用直接查表、激活规则、公式计算等3 种方式. 其中查表法最为简单,对微控制器的运算速度要求不高,为大多数比较简单的控制系统所采用;公式计算方法控制效果最好,但如果要通过关系矩阵的求取来实现控制规则的修正,在单片机中很难实现,因为它不但计算复杂,而且耗时多;激活规则推理方法对每一个输入都要进行推理计算,为了达到实时控制的目的,必须采用高性能的微处理器,在设计合理的情况下,其控制性能比查表法好.
本文研究的柴油机数字调速系统采用了有较高性能的16 位嵌入式单片机,若根据控制系统的性能要求设计一个合适的模糊控制算法,则采用激活规则推理方法是十分有效的.
转速模糊控制算法及实现
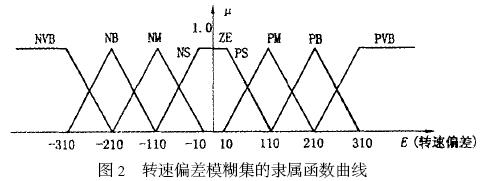
仅考虑转速闭环时,柴油机转速模糊控制系统框图如图1 所示.
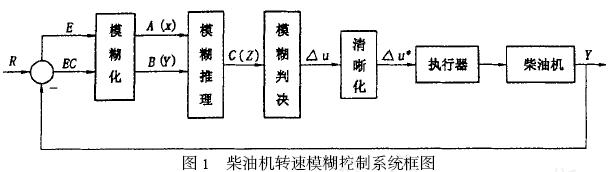
图1 中, R 为转速给定值; Y 为系统输出(实际转速值) ; E = Y - R 为转速偏差; EC 为转速偏差的变化率; A 为E 经模糊化处理后,论域为X 的模糊集; B 为EC 经模糊化处理后,论域为Y 的模糊集; C为论域为Z 的控制量模糊集;Δu 为C 经模糊判决后的控制增量;Δu*为清晰化计算出的实际控制增量.
2. 1 输入变量的模糊化
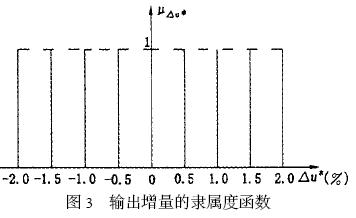
考虑到本文研究的转速控制系统被控对象是一台6135 型柴油机,最高转速为1 500 r/ min ,最低稳定转速为750 r/ min ,因此X 的论域可取为{ - 1 500 ,1 500} , y = { - 1 500 ,1 500} . 取转速偏差E 的论域为[ - 750 ,750 ] ,隶属函数取梯形2三角形式(见图2) .
转速偏差的语言变量E 在X 中取11 个语言值. 由图2 可见,每个模糊子集均可用以下两式表示:
μ( x) = ax + b (1)
μ( x ) = - cx + d (2)
显然,对任意转速偏差输入,在进行模糊化过程中,只属于两个模糊子集,对其它模糊子集的隶属度为零,如此处理可简化计算,减少内存和时间开销. 其中,转速偏差分为5 个区域,即[0 , 10 ] , [10 , 110 ] ,[110 ,210 ] , [210 ,310 ] , [310 ,750 ] ,每个区域的隶属度按(1) 式和(2) 式计算,区别仅在于系数a , b , c , d各不相同,由于μ( x) 轴的左半部曲线与右半部取为完全轴对称,因此当转速偏差为负值时,其计算程序上与上述程序相同.
2. 2 模糊规则及模糊推理
考虑最简单的情况,模糊控制器采用一维结构时,其控制规则如下:
If E is ZE then Δu is ZE
If E is PS then Δu is PS
If E is PM then Δu is PM
If E is PB then Δu is PB
If E is PVB then Δu is PVB
其中: Δu 为模糊控制量的增量值, 当转速偏差E 为负值时, 规则同上, 只是Δu 的符号相应改变(Δu的符号与E 的符号一致) ; ZE ,S ,M ,B ,VB 分别表示输出增量Δu 为“零, 小, 中等, 大, 很大”, P 表示“Positive”,N 表示“Negative”.
由以上分析可见,虽然模糊控制规则共有9 条,但由于转速偏差E 符号不同时,其控制规则是对称的,因此在实施模糊推理时,只用到了5 条规则. 此外,由于任意转速偏差E 只可能属于两个模糊子集,因此在实际运算时,对应每个采样周期的转速偏差输入只可能激活两条规则,这样处理的结果是大大简化了计算,保证了实时控制对微处理器运算速度的需要.
模糊推理采用近似推理法则. 对于一条被激活的规则, 控制增量Δu 的隶属度按Mamdani 合成推理方法计算,即
![]()
由于此处只考虑转速误差E 作为模糊输入变量,因此输出增量Δu 的隶属度与输入变量的隶属度相同.
2. 3 清晰化计算
对应于每个采集周期的转速偏差值E ,由上述模糊决策过程激活2 条控制规则(当E 小于10 r/min 时仅激活一条规则) , 并可求出每条规则中模糊输出增量Δu 的隶属度值. Δu*的隶属函数取单值线函数, 即一系列的离散值(见图3) .
输出控制量是执行器闭环控制的给定值, 其论域为{0 , 100 %} , 则输出增量Δu*
的论域取值为{ - 100 % ,100 %}
.
对于求出的模糊输出增量,采用重心法计算其精确输出增量值,即:

当采用一维模糊控制器时,对于上述的输入变量模糊隶属度函数的模糊推理方法,不难证明![]() 因此上式的计算量很小,易于在单片机中实现.
因此上式的计算量很小,易于在单片机中实现.
结 论
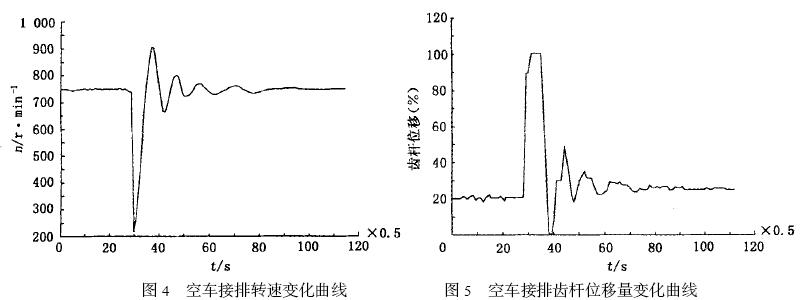
在以80C196 KC 嵌入式16 位单片机为核心的柴油机数字调速系统中,根据上述算法设计了控制软件,并在6135 型柴油机上进行了实机试验. 图4 和图5 表示了柴油机低速空车接排时转速和齿杆位移变化的动态过程. 由图可见,在接排的瞬间,柴油机的转速急剧下降,与此同时,齿杆位移量几乎是呈直线增加到100 % ,说明控制器控制动作的快速性已达到极限. 事实上,通过一系列性能测试,以本文提出的模糊控制算法为基本控制策略的柴油机转速控制系统具有良好的动态性能,但若仅采用模糊控制,系统的稳态性能达不到一级调速精度. 可采用多种控制策略来改善系统的稳态性能,其中Fuzzy-PID 复合控制是提高系统控制精度的有效途径.