一种 2-1-1 型 MASH ∑ - △调制器的系统设计
1 引言
片上系统(System on Chip)已经成为集成电路设计发展的必然趋势。在片上系统中,模数转换器作为模拟世界和数字世界的桥梁扮演着重要的角色。随着CMOS工艺的进步,关键尺寸不断缩小,这使得数字部分的电路可以做到更低的功耗和更小的面积,但是模拟部分的电路却未必如此。更低的工作电压意味着需要更大的功耗和更复杂的电路结构来保证运算放大器有相应的动态范围。因此,很多SOC产品采用的工艺升级以后,DSP部分的成本相应减小了,但是ASP部分的成本并没有减小。
20世纪60年代面世的∑-△ADC利用过采样和噪声整形技术,放宽了对模拟电路的要求,通过速度换取精度,减小了模拟电路的规模,更有利于与先进的CMOS工艺集成。目前,随着开关电容技术的成熟,离散时间∑-△ADC已在高分辨率、中低速的场合得到广泛应用。
因为∑-△调制器的采样时钟周期和信号周期相差较大,即过采样率较高和电路非线性的本质特征,所以即便使用目前配置较高的计算机,对一个高精度∑-△调制器的晶体管级仿真也需要相当长的时间,这对设计者为了得到理想信噪比而对电路进行结构改进和性能优化是十分不利的。业界对∑-△ADC提出了很多种行为级的仿真方法,其中较为流行的方法是采用MATLAB中的SIMULINK工具箱。它能够对一些重要的非理想因素进行建模,使设计者可以在时域很好地预估∑-△调制器的性能,大大提高了设计效率。
首先,本文讨论了开关电容∑-△调制器几种重要的非理想因素和行为级模型。其次,本文以2-1-1结构∑-△MASH调制器为例,介绍了行为级设计方法。
2 ∑-△调制器非理想因素建模
在∑-△调制器中,除了量化噪声外,电路中还有其他非理想因素影响系统的信噪比。通常需要考虑的非理想因素有时钟抖动、开关的非线性、KT/C噪声和运算放大器的非理想参数(等效输入噪声、有限带宽、有限增益、有限压摆率和运放有限摆幅)。下面以图1开关电容(SC)1阶∑-△调制器为例,对这些非理想因素做简要说明,并给出用SIMULINK构造的模型。
 |
2.1时钟抖动
在实际电路中,采样时钟大多源自晶振或锁相环,他们都存在一定的相位噪声,会造成采样时刻的不确定性,如图2,这种现象就是时钟抖动。时钟抖动对电路的影响与电路本身的结构和阶数无关。在分析时钟抖动影响时,只需考察它对输入信号采样的影响。
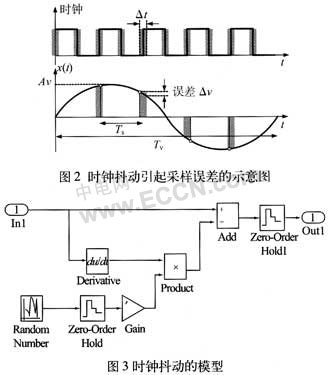 |
对一个幅度为Av,频率为fv的正弦输入信号,它由时钟抖动引起的误差为:
 |
假设△t是服从标准差为δ的正态高斯分布,其SIMULINK模型可表示如图3。
2.2 开关引起的非线性
开关的非线性可由其非线性电阻模型建模。假设开关由互补CMOS组成,那么它的等效跨导可由下式表示:
 |
由上式引起的采样误差与输入信号有关,因此会产生非线性。这种非线性可用MATLAB函数表示,在系统仿真时作为一个模块调用。
2.3开关的热噪声
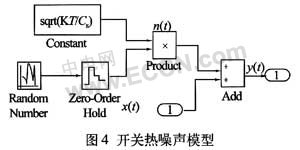
热噪声是由载流子运动造成的。假设开关的等效电阻为Ron,那么输入信号由开关网络产生的噪声功率e2T为:
|
|
式中K为波尔兹曼常数,T为绝对温度,该开关热噪声叠加在输入信号上,可用下式表示:
|
|
上式中n(t)服从高斯正态分布。该行为级模型如图4。
 |
积分器有两个输入开关,一个用于输入信号的采样,一个用于反馈信号的采样,在行为级仿真时要同时考虑这两个开关的热噪声。
2.4运放的噪声
运算放大器的噪声主要包括热噪声、1/f噪声等,它的影响就相当于一个噪声电压叠加在运放的输入端。在低通∑-△调制器中,1/f噪声和直流失调可以由自动调零或chop等技术很好地消除掉;在带通∑-△调制器中,它们的影响并不重要。因此,运放的等效输入噪声v2n在带内可以近似地认为是白色的,它可以在时钟φ2(见图1)由晶体管级仿真得到。其行为级模型如图5。该噪声等效到积分器前需乘以系数b(b=Cs/Cf),见图6。
 |
2.5运放有限增益
理想情况下,积分器的直流增益是无穷大,但是由于受模拟器件本身的限制,积分器的直流增益是有限的,进而导致积分器前一次的输出值只有一部分被叠加到了新的采样值上。考虑积分器这种泄露现象以后,它的传输函数可以表示为:
 |
其SIMULINK创建的模型如图7。运放有限增益对积分器的影响需要与运放有限带宽和摆率等因素同时考虑。
 |
2.6 运放有限带宽和摆率
运放的有限带宽和摆率对积分器的影响是相互关联的,可以看作是非线性增益。需要分两种情况考虑。
一种是假设运放的摆率很大,那么积分时间只与运放带宽有关,在图1所示的SC积分器中,第n个积分周期的输出可以表示为:
 |
GBW是当运放负载为Cf时的单位增益带宽。
当摆率比输入信号最大变化率小时,积分器会产生失真。这种情况下可用式(8)表示。有限带宽和摆率的影响可编写为MATLAB函数形式,在系统仿真时作为一个模块调用。
 |
2.7运放的摆幅
对运放摆幅的建模比较简单,可直接调用SIMULINK中的saturation模块,如图7。
 |
3 2-1-1型MASH调制器结构
有效位数ENOB是评估AD转换器精度的重要技术指标。ENOB与动态范围DR的关系为:
|
|
因此,要想得到高分辨率的转换器,必须有足够大的动态范围。调制器动态范围与调制器阶数L,过采样率OSR和量化器位数B的关系为:
|
|
由上式可知,增加调制器量化位数B可以增加动态范围,但是多位量化器的非线性提高了系统对元器件匹配精度的要求,即使采用一些自适应算法可以降低这种非线性的影响,但是这又增加了系统的实现难度。增加过采样率OSR也能提高动态范围,但OSR的提高受工艺水平限制。因此,选择了合理的OSR后,再通过提高阶数L进一步提高动态范围。高阶∑-△ADC主要有两种拓扑结构:单环和MASH结构。单环三阶以上的∑-△调制器会存在稳定性问题,尽管已有一些技术可以解决该问题,但是大大增加了系统的复杂性。MASH结构是采用了多个稳定的低阶回路级联而成,不存在稳定性的问题,是比较流行的一种做法。
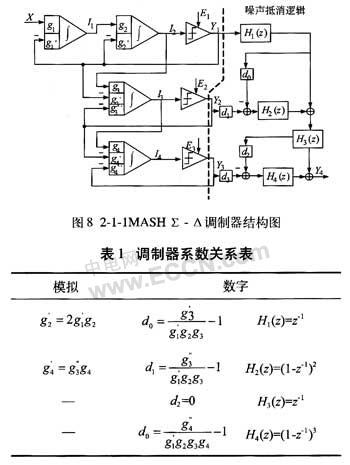
图8为4阶2-1-1MASH结构,前一级量化噪声经过整形后作为下一级调制器的输入信号。理想情况下,当系数满足表1时,经过噪声抵消逻辑后,第一级和第二级的量化噪声被抵消,输出信号只与最后一级的量化噪声有关。最后输出的表达式为:
|
|
级联结构的动态范围DR在式(10)理想值的基础上减小20log(d3)dB。
 |
4 行为级仿真结果
在设计2-1-1MASH∑-△调制器时,选取调制器各级系数除了必须满足表1外,通常还满足以下原则:
(1)使d3尽量减小,避免由此引起的分辨率过多损失;
(2)过载度尽量大,以获得较高的峰值信噪比;
(3)积分器的输出摆幅尽量小,尤其是低电压工作时更应注意这点;
(4)模拟部分系数的选取应能使各个采样、积分电容版图可以很好地匹配,并有较小的面积;
(5)噪声抵消逻辑中各系数的选取应考虑能用简单的逻辑寄存器来实现。
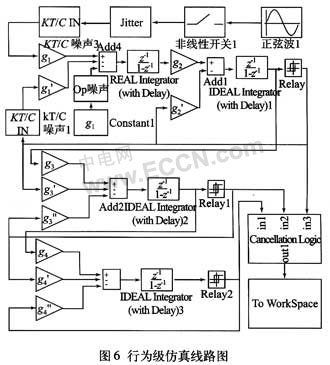
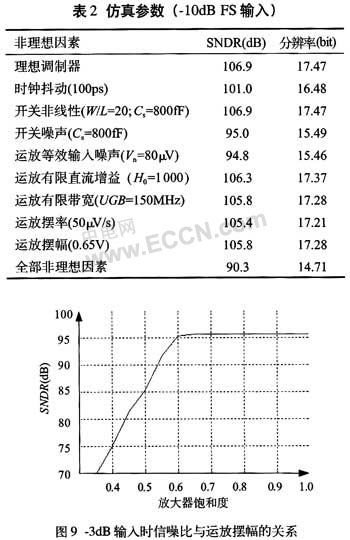
基于上述原则,并且考虑调制器第二级、第三级的电路可以复用,选取g1=g1’=1/8,g2=1,g2’=1/4,g3=0,g3’=1/2,g3”=1/4,g4=0,g4’=1/2,g4”=1/4。行为级仿真线路图如图9。图中考虑了各种非理想因素对调制器输出的影响。过采样率64,采样时钟频率19.2MHz,信号带宽150±12kHz。电路可以通过行为级的仿真确定非理想因素的约束条件,图9以运放摆幅为例,给出以-3dB FS输入时,系统信噪比与运放摆幅之间的关系,由该图可以看出,运算放大器摆幅至少要大干0.65,调制器各非理想参数仿真结果见表2。
 |
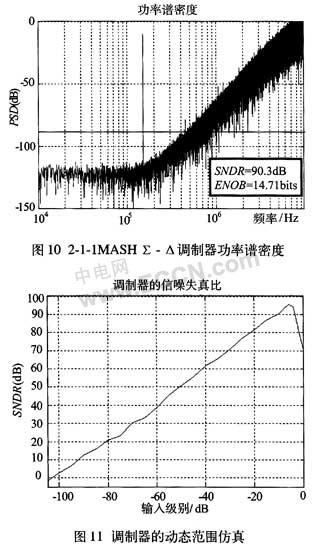
2-1-1MASH调制器经过噪声消除电路输出的比特流功率谱密度如图10。由图10可以看出,噪声在特内得到很好的抑制,经过降采样数字滤波器后信噪比得到极大提高。图11为调制器的动态范围仿真,结果表明调制器峰值信噪比94dB,并可获得95dB的动态范围。
5 结束语
本文首先讨论了∑-△调制器非理想因素及其用SIMULINK创建的模型,然后以2-1-1MASH结构为例,介绍了∑-△调制器行为级设计的方法。仿真结果表明,在-10dB FS输入情况下,可达到14.7bits的分辨率,并可获得94dB的峰值信噪比和95dB的动态范围。该结果与后续的晶体管级仿真十分接近,为调制器电路设计提供了有效参考。
 |
相关推荐