微小型无人机全姿态增稳控制系统的设计与实现
3 姿态增稳控制软件设计
整个飞控系统的输入量即为传感器所采集的飞行状态值,输出量为飞机状态方程的控制变量(舵值和发动机推力),所以飞控系统实质上是一个多通道的控制系统,即多输入/多输出控制系统。其中,飞控系统的核心控制回路是以姿态角(俯仰角/滚转角的)反馈信号为基础构成的飞行姿态稳定和控制回路,即内回路。
在内回路的基础上,又引入高度保持、航迹控制等外回路。
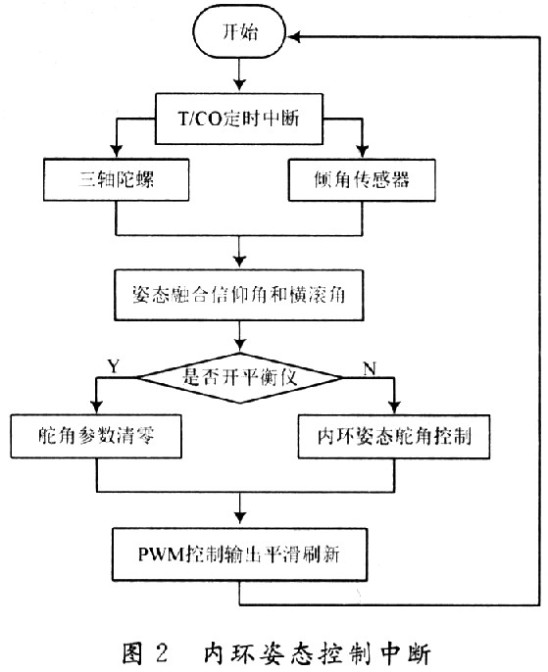
在飞控系统的姿态增稳控制回路中三轴陀螺实时反馈飞机的俯仰、横滚和偏航的角速率。另外,将三轴陀螺的俯仰角速率和横滚角速率分别与倾角传感器测得的俯仰角和横滚角进行姿态捷联解算。主控单片机利用定时/计数器O的定时中断,间隔30 ms循环进行内环的姿态控制,控制流程如图2所示。由于飞机沿纵向平面的对称性,无人机飞行控制可以分为相对独立的纵向控制和横侧向控制通道。
(1)横侧向控制通道:无人机的横侧向运动即无人机的滚转和偏航运动,主要通过副翼通道来实现。在横侧向控制通道中有滚转角反馈和滚转角速率反馈,这两项构成了滚转通道的核心回路——内回路。另外,航向偏差反馈只有在无人机作定向直飞、航向跟踪或者自主导航时才需要接人,以稳定控制无人机的飞行航向;侧偏距反馈仅当无人机进入自主导航时才需要接入,以控制无人机跟踪预先设置的飞行航线;误差积分反馈仅仅当无人机做定向直飞时才接入,以消除无人机左右不对称性等因素的影响,改善无人机航向控制的精度以及左右转弯的对称性。
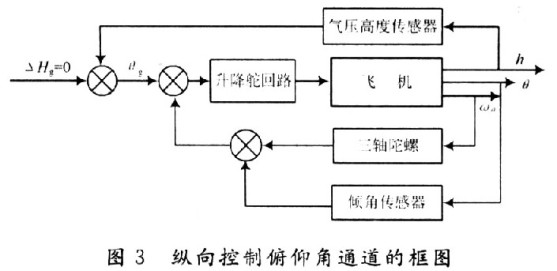
(2)纵向控制通道:无人机的纵向运动即指无人机的俯仰及升降运动。无人机的纵向运动规律是通过操纵无人机的升降舵来实现的。在纵向控制通道中有俯仰角反馈和俯仰角速率反馈,这两项构成了纵向通道的核心控制回路——内回路。另外,还有高度差反馈,只有在无人机做定高飞行时才需要接入,以稳定无人机的飞行高度。纵向控制俯仰角通道的框图如图3所示。
通常可以把无人机飞行过程划分为几个相对独立的航段。一个最基本的自主飞行工程可以划分为6个航段:起飞阶段、出航平飞阶段、转弯阶段、返航平飞阶段、盘旋阶段和着陆阶段。每个航段的任务相对独立,把各航段的复杂飞行状态分解为几个基本的飞行任务:平飞、转弯、升降等。这样通过相对独立的纵向控制通道和横侧向控制通道来协调实现无人机的平飞、转弯、升降等基本飞行任务。
4 结语
在无人机中,飞控系统是主要组成部分,而姿态增稳控制则是对无人机顺利执行各项任务的有效方法。本文以实际应用为背景,详细介绍了基于三轴陀螺和倾角传感器构成全姿态增稳控制系统的硬件实现及软件设计,并将其运用在某型无人机中,针对系统中飞行姿态控制的的流程和内环姿态控制的规律进行了详细的分析与研究。经过百余次试飞,基于三轴陀螺和倾角传感器构成的姿态增稳控制系统,不仅满足了现阶段任务要求,还达到了良好的效果,为同类无人机的开发与研制提供了一套行之有效的方法。