热电致冷的激光器温度控制电路设计
热敏电阻作为传感器探测激光器内部温度,并将温度转换为自身阻值的变化,然后由温度控制电路将电阻的变化转换为电压的变化,其转换精度决定了测温的精度。转换后电压值的大小决定TEC LOOP电路的电流的流向(流入还是流出),以此来实现TEC控制电路的制冷或制热。
图3为设计的TEC LOOP电路。
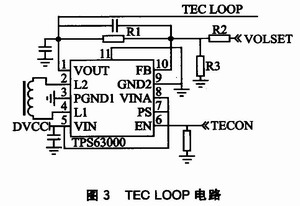
在TPS6300X系列芯片中,为了更好地控制输出电压VOUT,通常用FB引脚电压值的变化来感知输出电压V(OUT值的变化,这就意味着FB引脚要和VOUT引脚直接相连。
可得出,VFB=K1·VOUT+K2·VDAC。其中,K1、K2为常量,VDAC为MCU的控制电压。通过对输出电压VOUT值的控制,当电流由ITEC(+)流向ITEC(-)时,激光器将制冷,反之制热。
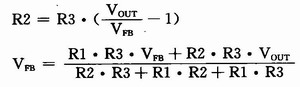
在这个可调节的电压输出系统中,要调节VOUT值,还要用一个外部的分压电阻连接在FB、VOUT和GND之间。为了能正常地调节VOUT值,V-FB值最大不超过500 mA,IFB不超过0.01μA,RB的阻值小于500 kΩ。分压电阻RA阻值由VFB、YOUT和RB确定。
1.3 TEC LOOP控制算法
PID(Proportional Integral Derivative)控制是一种线性的调节,即比例、积分、微分控制。PID控制有模拟PID和数字PID控制两种,通常依据控制器输出与执行机构的对应关系,将基本数字PID算法分为位置式PID和增量式PID。本文中TEC LOOP控制采用了适合于温度控制的位置式PID控制算法。该算法原理简单,只是将经典的PID算法理论离散化,运用于计算机辅助测量,结构简单易于实现。图4是TEC LOOP的控制模型。
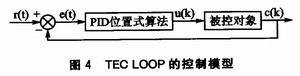
该控制模型的控制表达式为:
![]()
其中,Kp为比例调节系数,Ki为积分调节系数,Kd为微分调节系数,e(k)为每次采样值与目标值的差值,u(k)为每次计算后用于调整温度的DAC值。模型中的反馈部分是将24位DAC的采样值转换成温度,当前温度与目标温度的差值通过PID算法计算出当前需要调整的DAC值,从而来实现温度的精确控制。
2 实验结果及分析
基于以上设计的TEC控制电路,分别对4只EML激光器在
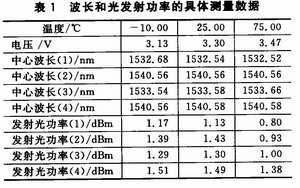
从表中可以看出,当TEC控制在
结语
本文所设计的基于TPS63000的温度控制电路,已成功应用在CyOptics公司的EML激光器中。实际使用证明:该电路可以有效地对TEC的温度进行控制,能够使EML激光器长期、稳定地工作在设定温度下。此模块工作温度宽、集成度高、成本低,经过进一步优化设计还可以适用于大多数集成光通信系统。
相关推荐
