IEEE 802.15.4的CC2530无线数据收发设计
帧控制域占一个字节。其中,帧类型占2位,00表示同步帧,01表示数据帧,10表示确认帧,11表示命令帧;确认请求占1位,1表示接收设备在接收到数据帧或命令帧时如果判断其为有效帧就要向发送设备反馈一个确认帧,0表示该接收设备不需要反馈确认帧。帧序号唯一标识各个帧,用于确认帧和数据帧或命令帧的匹配。目标地址和源地址分别用2个字节表示。由于IEEE 802.15.4规范中定义了物理服务数据单元(PSDU)的最大长度为127字节,而其中的8字节已经被使用,因此有效负载(pay-load)的字节长度为1~119字节。
数据发送有3种模式:非CSMA-CA、时隙CSMA-CA和非时隙CSMA-CA。待数据按上述格式写入TXFIFC)后,执行“RFST—ISTXON”启动CSP程序。
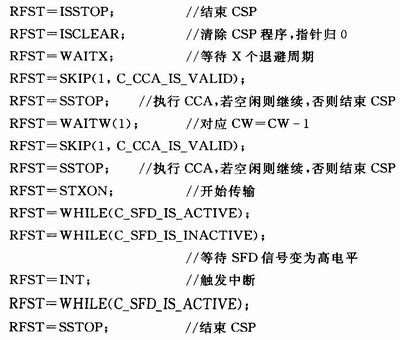
以下为基于时隙CSMA-CA模式的CSP程序代码:
4.2 实验结果
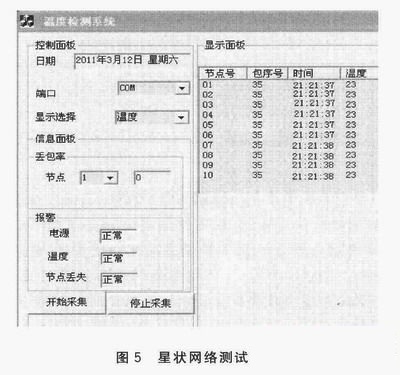
本网络是由一个中心节点及10个终端节点组成的星状网。硬件采用由CC2530制作的传感器板,测试数据由片内自带的温度传感器提供。
如图4所示,中心节点采用轮询的方式采集终端数据,通过串口显示到上位机软件上。其中,a代表中心节点发送的命令帧;b为上传的数据帧;c为中心节点发送的确认帧。终端节点采用非时隙CSMA-CA的方式发送数据。

图5所示测试结果表明:在节点通信半径内,当轮询时间大于等于15.36 ms时,节点间通信未丢失任何数据包,且没有误码现象。随着节点距离增大,节点丢包率逐渐上升。周期时间随着节点的增多而增大,延时积累明显。
结语
本文设计了基于CC2530的无线传感器网络节点,并详细介绍了两个节点之间点对点通信的实现,同时对CSMA-CA算法进行了详细说明。实验结果表明节点能够正常通信。
本文为进一步的上层通信协议设计提供了基础,具有一定的参考价值。