双轴跟踪系统运动规律研究
摘 要:由于采用双轴的捕获跟踪系统,涉及到多个反射装置对光路发生转折,从而在控制算法的设计上必须考虑对探测器脱靶量的修正,本文主要叙述基于一个实际的平台系统对双轴多反射镜的运动规律的推导以及试验主要接口连接,最终利用DSP来实现对双轴系统的捕获跟踪控制。
关键词:双轴;捕获跟踪;运动规律
1 总体思路
在某课题的捕获跟踪系统设计中,采用单检测器双轴平台对目标实现捕获跟踪,从而进行跟踪测距测量工作。所谓双轴就是采用主轴和子轴系统,主轴是大范围扫描系统,对于目标建立一个粗略的大范围的搜索空间,其视场大,但是精度低,带宽窄;子轴是快速扫描系统,在大范围系统建立的工作区间进行精跟踪,其视场小,但是精度高,响应快,带宽宽。这样整个系统的跟踪精度主要由子轴系统来确定。
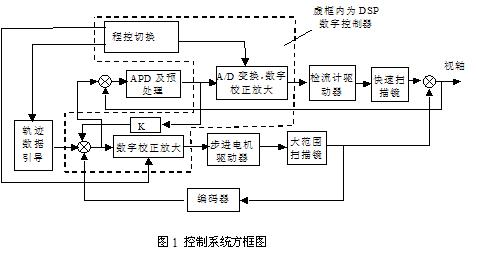
在控制双轴联合运动的过程中,对光路转折根据试验平台和实际的试验空间位置进行深入的研究后,推算出光路折算公式,应用到控制算法中,用DSP作为主控制器,对检测器得到的目标脱靶量进行适当的修正,从而控制系统指向目标的正确位置。控制框图如图1。
光路转折的影响在跟踪阶段如果不进行换算,则无法控制电机带动反射镜转动到正确的期望位置,从而导致始终无法跟踪上目标,甚至丢失目标之后也无法再次搜索捕获,最终完全失去目标。
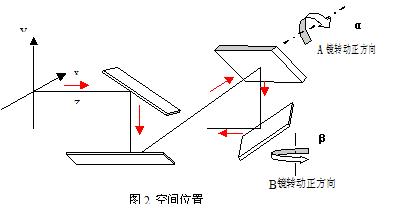
试验中大范围扫描镜和快速扫描镜的空间位置示意图见图2。合作目标为一角反射器。通过激光器发射的一束连续波激光在角反射器的反射,由APD四象限探测器来接收反射光,从而确定目标即角反射器输出的脱靶量。此时由快速扫描镜(以下叫C、D镜)的偏角得到在x、y方向的相对偏角,再通过大范围扫描镜(以下称A、B镜)的纠偏动作来配合快速扫描镜将反射到四象限探测器上的光点纠正到探测器的中心,使光轴指向与目标中心位置一致,便于测距。图2中四个镜从右上起沿顺时针方向依次为ABCD镜。α轴是A镜和B镜一同在高低方向运动(视场y轴),β轴是B镜单独在水平方向运动(视场x轴)。
由于要利用大范围扫描镜和快速扫描镜联合工作进行合作目标捕获跟踪,所以在算法实现上要对目标的运动进行折算。即是说,当在视场中目标移动(针对本课题实际跟踪目标的通常运动速度,在实验中一般控制模拟目标移动速度为约0.02~0.2m/s),目标的相对位置变化可以以数值形式获得,但必须要经过光路的纠直来转换当量进行计算,以求得大范围镜实际的运动方向和大小。
2 联合运动规律
将光轴纠直不会影响几何光学的计算,但是可能会影响能量损失,在这里,损失的能量被忽略。为了将光轴纠直,要进行坐标变换。
用齐次坐标表示三维图形的坐标变换,如把三维空间的一个点P的直角坐标(x,y,z)表示成齐次坐标则为:
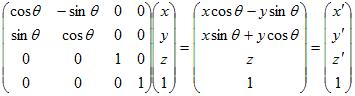 (式1)
(式1)
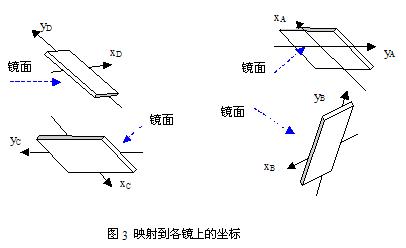
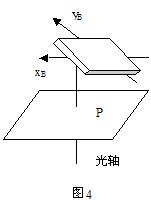
对于如图2所示的空间位置,映射到各个镜面上的坐标见图3。从C镜到A镜之间有一个放大5倍的系统,假定其将坐标映射转动了180度,实际上对计算并没有实质上的影响。先将B镜光轴折算成与A镜一致,则B镜绕xB转为图4所示镜面坐标。假定A镜面坐标投影到与光轴垂直的平面P上为(xA’, yA’),若视场上有一目标点(x0, y0),则其在B镜面坐标上为(xB0, yB0),在A镜面坐标上为(xA0, yA0)。投影到P上则有关系:xA’=xB0=x0,yA’= -yB0=y0。若B镜相对初始位置有一角度β(β≥0),方向由右手定则来定,右手大拇指所指的方向与光轴方向相同,而光轴方向是假定为D->C->A->B,如图2中箭头所示,按此则B镜的角度应该为-β,因此投影到P上的关系为:
 (式2)
(式2)
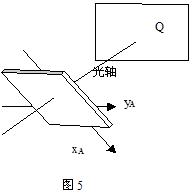
然后A镜要与C镜的光轴一致,转折为图5所示。C镜面投影到平面Q上的坐标为(xC’, yC’),有xC’= -xA’,yC’=yA’。若A镜相对初始位置有一角度α,则有关系:
变换后得:
![]() (式4) ,
(式4) ,
其中x0’、y0’是用C、D镜获得的探测器偏移。
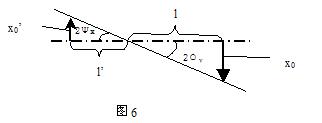
对于x0与x0’的关系,参见图6。有:
x0=l·tan(2Οy);x0’=l’·tan(2Ψx)。同理,y0和y0’也有类似关系。而l =5·l’,带入上式,得到:

当系统将目标捕获后,目标不一定就落在四象限探测器的中心,C、D镜也不一定在零位附近,先利用快速镜将目标纠正到探测器中心,这时C、D镜相对的偏角就是Ψx、Ψy(镜转过角θ,则反射光线转过2θ角)。然后A、B镜根据计算的纠偏角Οx、Οy运动到位,而这时C、D镜运动回到零位,同时使目标在探测器中心,为测距做准备。Οx是x方向纠偏角,对应于B镜;Οy是y方向纠偏角,对应于A镜。
3 主要接口连接
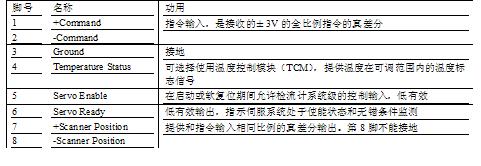
DSP针对快速扫描系统通过D/A端口与两套美国GSI LUMONICS公司的MiniSax检流计驱动器连接实现控制。D/A为12-bit,相应的值代表了镜片的相对角度。镜片零位值设为0x800,运动范围从0x000到0xFFF。MiniSax的端口J1为电源输入。端口J2为控制信号输入口,8针,引脚名称见表1。将DSP的端口 DACOUT0和DACOUT1出来的信号分别接到两套检流计的J2脚1,如果满量程为±3V,则1个数字位对应输出电压为6V/4095=1.465mV。脚2和脚5接地,其余悬空,用来控制检流计电机的动作。端口J3、J4、J5接到配套的直流电机。检流计为同一家公司的M3ST,其最大扫描角度为±30°。
表1 MiniSax控制信号输入口引脚
DSP的I/O连接大范围系统步进电机驱动器和编码器细分电路板。步进电机及驱动器都是美国Pacific Scientific公司的产品,步进电机型号为POWERMAX II,驱动器为6400系列中的6410。编码器细分电路板是由协作单位设计的两块电路板。DSP的IOPA0、IOPA1、IOPA2、IOPA3引出作为电机驱动器的控制信号,实现控制是对DSP寄存器PADATDIR的3~0位写入0或1。其中PADATDIR(11~8)是指明A(I/O)口作为输出,PADATDIR(3~0)为1时输出高,为0时输出低。PADATDIR(0)控制电机A的运动,一个脉冲电机走一步;PADATDIR(1)控制电机B的运动,一个脉冲走一步;PADATDIR(2)控制电机A的转动方向;PADATDIR(3)控制电机B的转动方向。6410驱动器工作电源是直流+24~+75V,信号接口J1是9针口,引脚定义见表2。
表2 6410信号接口J1引脚定义
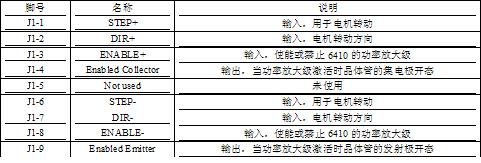
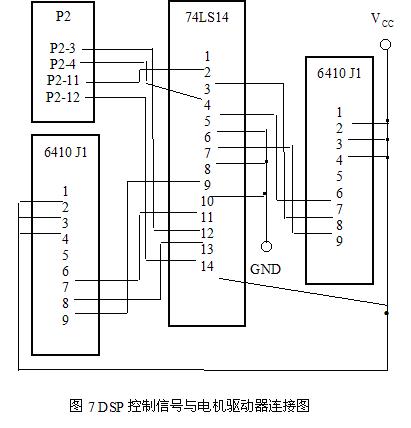
使用时将J1的1、2、3脚连在一起接+5V电源,6脚接收电机转动的信号,7脚接收电机转动方向的信号,4、5、9脚悬空,8脚接地。见图7。
4 试验及结果
C、D镜的摆角范围在±7°之内,A、B镜的运动范围分别是:α范围为-35°~90°,β范围为±90°以内。故可以估算Οx、Οy的范围在大约±2°以内,是一个很小的运动范围。首次定位如果用模型引导的方法来纠偏,效果不是很理想,因此采用变步距模糊逼近的方法,效果很好。之后通过跟踪算法验证能够同时跟上目标的移动。
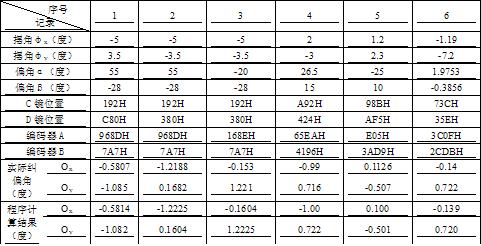
表3是在进行纠偏算法设计时记录的部分数据,可以看出算法的误差一般在小数点后第二位。实验中将A的零位定位为38B0H,B的零位定位为2D60H,为了实验的方便性而且不影响结果的情况之下,A、B镜的负方向不要超过33°,而正方向即使α、β都为90°时也不会超出编码器的范围导致循环。
表3 部分数据记录