高速数据的抖动
定时抖动是使用幅度转换表示定时信息的所有电子(光)系统中不受欢迎的伴生物。抖动的大小和成分和系统的误码率密切相关,研究抖动也就是研究分析误码的起因,只有全面地分析抖动,其根本原因才能被隔离,从而可以系统地减少抖动,提高系统性能。随着速率的提高,同时电压(或光功率)摆幅不断缩小,以节约功率,系统中的定时抖动占信号区间的比例正变得越来越大。在这些情况下,抖动已经成为限制性能的一个基本因素。为成功地部署高速系统,可靠地满足性能要求,必须对系统中的定时余量在整个系统中更加严格进行控制。
抖动分析
但从概念上而言,抖动是定时边沿偏离了它们的“正确”位置(如图 1所示)。在基于时钟的系统中,定时抖动是最明显、最直接的不理想形式。若算它为一种噪声形式时,必须把抖动作为随机过程进行处理,并检定其统计特点。如果你有一种方法能够测量抖动的统计数据,那么你就可以比较各个元器件和系统,并选择上下限。
抖动分析基本上包括比较抖动时钟信号和参考时钟信号(如图 2所示,电压或功率电平的跳变沿相对于理想的参考时钟超前或滞后,就是抖动)。理想的参考时钟是一种单独的黄金标准时钟或通过通过黄金锁相环(Golden PLL)电路及算法产生的恢复的时钟。比较该参考时钟和从数据中直接恢复时钟之间的误差,即时间间隔误差TIE(Time Interval Error),就可以得到抖动随时间的变化曲线。事实上,TIE曲线也就是抖动的时间分布曲线,其幅度反映抖动的大小(或幅度),频率则为抖动的频率。
抖动的绝对大小是以时间(秒)为单位,由于系统对定时余量的要求和系统速率相关,单纯的抖动绝对值大小并不能作为评价系统抖动的依据,通常我们将抖动的绝对值和系统时钟周期的比值(也称为单位间隔UI) 作为抖动的相对单位。1UI的峰峰值抖动反映的是抖动的峰峰值绝对值等于数据时钟周期。
为了便于我们对抖动有直观的认识,我们这里主要以基于采样示波器的眼图测试来分析抖动。

图1
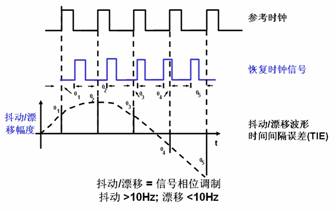
图2
如图 3所示,眼图是逻辑脉冲的重叠。它为测量信号质量提供了一种有用的工具,即使在极高的数据速率时,也可以在等时采样示波器上简便生成。边沿由‘1’到‘0’转换和‘0’到‘1’转换组成,样点位于眼图的中心。如果电压(或功率)高于样点,则码被标为逻辑‘1’;如果低于样点,则标为‘0’。系统时钟决定着各个位的样点水平位置。
幅度噪声可能会导致逻辑‘1’的电压或功率电平垂直波动,低于样点,导致逻辑‘1’码错误地标为逻辑‘0’码,即误码。抖动描述了相同的效应,但它是水平波动。抖动或定时噪声可能会导致码的边沿在水平方向中的样点内波动,这种波动最终会导致错误。从这种意义上讲,抖动定义为一个数字信号在有效时点上距理想时间位置的短期变化。脉冲电压电平的波动源自不想要调幅(AM)。类似的,转换的定时波动可以描述为脉冲相位波动、不想要的调相(PM)或相噪。
等时取样示波器上显示的眼图由从多个不同逻辑脉冲上取样的数据组成。“轨迹”由参考时钟提供的触发之后的顺序时间上采集的数据点组成。显示的是一个两维直方图,如图 3和图 5所示。某个点上的颜色或亮度用来衡量该电压或功率上相对于触发信号的时间上发生的样点数量。取样示波器可以把一个像素宽的交点块投到时间轴上,构成眼图交点直方图(图 4),测量抖动输出。眼图交点直方图近似计算信号抖动输出的概率分布函数。
抖动统计分析基础
由于所有已知信号包含具有随机成分的抖动,因此必须采用统计手段,以便正确检定抖动。常用的统计分析手段包括:
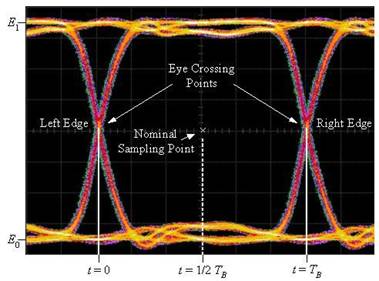
图3
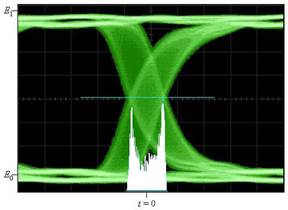
图4
中间值: 时钟周期的算术中间值或平均值是额定周期。这是频率计数器所测量的频率的倒数。
标准偏差: 标准偏差用希腊字母sigma (σ)表示,代表测量值偏离中间值的平均量。标准偏差在描述高斯过程中特别有用,因为通过中间值和标准偏差就能完全标明了高斯分布的概况。
最大值、最小值和峰到峰值: 最大值和最小值一般指测量区间过程中实际观察到的值,峰到峰值则是最大值与最小值之差。应明智地使用这些指标。对确定性信号而言,即使是在相对较短的测量区间内测得的,这些值仍很可能等于其实际的真正值。但对具有高斯分布的随机信号而言,理论上最大值和最小值是没有限制的,因此观察到的峰到峰值一般会随着测量时间的增长而增长。为此,应与样本总量及分布类型的某些知识一起使用峰到峰值。
样本总量: 样本总量是统计数据集中包括的各个观察的总数。在随机过程中,样本总量高可以直观地提供更高的置信度说明测量结果是可重复的。若分布的特点是已知的或是可以估计的,就可以计算所需要的样本总量才能把测量的不确定性降低到所希望的水平以下。
直方图是绘制数据集中的测量值与此测量值发生的频率次数的关系图。如果数据集内的测量数量大,直方图可以很好地估计集合的概率密度函数(pdf)。采样示波器分析抖动的方法主要是对眼图交叉点或跳变沿(通常是50%的交叉点)的数据进行统计分析,计算出测量值发生的概率分布。
抖动分离与模型
由于可以绘制抖动测量结果与时间的关系图,因此一个明显的延伸是对这些测量结果运用傅立叶转换,在频域中显示其结果与频率的关系图。这可以得到抖动频谱,其中在水平轴上显示调制频率,在垂直轴上显示调制振幅。频谱分析的优点之一是可以清晰地区分周期成分,若不从频谱的角度去检查,这些周期成分很可能被宽带噪声所掩盖。
为了解实际系统的行为,通常可以使用系统的数学模型。通过调节各个成分的参数,可以调谐这样一个模型的行为。如果根据实际系统的观察结果选择模型的参数,那么可以使用该模型预测系统在其它条件下的行为。因此,分解抖动(也称为分离抖动)的动机之一是推断很难直接测量或直接测量耗时太长的系统性能。
通过这种方式建立系统模型的另一个动机与分析有关。如果每个模型成分与一个或多个底层物理效应有关,那么理解模型就可以透视抖动过高的确切原因。
所有复杂系统的模型都作出了许多假设和简化,因此模型与实际系统之间的拟合是不可能完全的。事实上,在拟合模型行为与观察的测量结果时,通常有某些参数选择范围。为此,抖动分离具有一定的艺术性技巧和科学性,不能希望它实现“99.99%”的测量重复性。
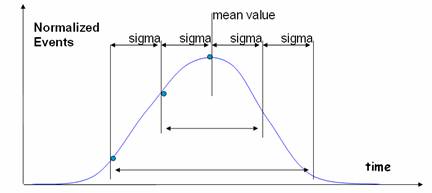
图5
最常用的模型中总抖动(TJ)先分成两类:随机抖动(RJ)和确定抖动(DJ)。确定抖动可以进一步细分成多个类别:周期抖动(PeriodicJitter,有时也称为正弦曲线抖动或Sinusoidal Jitter)、工作周期相关抖动(Duty Cycle Dependent jitter)和数据相关抖动(Data Dependent Jitter,也称为码间干扰或Inter-SymbolInterference)。有时还使用另一种类型(有界限的,不相关抖动或Bounded Uncorrelated Jitter)。
下面分别介绍了每种抖动的特点和根本原因。
随机抖动(RJ)
随机抖动是不能预测的定时噪声,因为它没有可以识别的模式。尽管在理论上随机过程具有任意概率分布,但我们假设随机抖动呈现高斯分布,以建立抖动模型。这种假设的原因之一是,在许多电路中,随机噪声的主要来源是热噪声(也称为Johnson 噪声或散粒噪声),而热噪声呈现高斯分布。另一个比较基础的原因是,根据中心极限定理,不管各个噪声源采用什么分布,许多不相关的噪声源的合成效应该接近高斯分布。
高斯分布也称为正态分布,其PDF可以使用人们熟悉的振铃曲线进行描述,图 6示蓝色部分为随机抖动的直方图。它的一个最重要的特点是:对高斯变量,它可以达到的峰值是无穷大。尽管这种随机变量的大多数样本将会聚集在中间值的周围,但在理论上,任何单一的样本,它可以偏离中间值任意大的量。所以RJ的峰到峰值没有边界(从这种分布中的样本数越多,所测得的峰到峰值将越大),而RJ的均方根RMS值则收敛到高斯分布的宽度上。
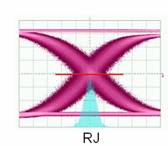
图6
有界不相关抖动(BUJ)
有界不相关抖动(Bounded Uncorrelated Jitter)实际上就是有边界的高斯分布抖动。和随机抖动最大的区别在于BUJ的峰峰值是具有上下限。CEI标准对此进行了描述,其产生采用PRBS码型发生器通过特点带宽的低通滤波器形成。
确定抖动(DJ)
确定性抖动(DJ)包括占空比失真(DCD)、码间干扰(ISI)、正弦或周期抖动(PJ)和串扰。
确定抖动是可以重复的、可以预测的定时抖动。正因如此,这个抖动的峰到峰值具有上下限,在数量相对较少的观察基础上,通常可以以高置信度观察或预测其边界。下面几段根据抖动特点和根本成因,进一步细分了这类抖动。
周期抖动(PJ)
以周期方式重复的抖动称为周期抖动,由于任何周期波形都可以分解成傅立叶顺序的谐波相关的正弦曲线,这类抖动有时称为正弦曲线抖动。一般来说,周期抖动与数据流中任何定期重复的码型无关。
周期抖动一般是由耦合到系统中的外部确定性的噪声源而引起的,如开关电源噪声或强的局部RF 载波。时钟恢复PLL 不稳定也可能会导致周期抖动。周期抖动的直方图如图 7示(蓝色)呈现双峰值分布特性。
数据相关抖动(DDJ)
与数据流中的位序列相关的任何抖动都称为数据相关抖动或DDJ。DDJ 通常是由电缆或设备的频响引起的。 DDJ是包含码间干扰(ISI)和占空比失真(DCD)两种效应之和。
占空比失真(DCD)
可以根据相关边沿是上升沿还是下降沿预测的抖动称为占空比失真(DCD)。DCD源自时钟周期中的不对称性,其常见原因有两个:
1. 上升沿的转换速率与下降沿的转换速率不同:判定门限位于50% 振幅点,但波形的上升时间慢,导致上升沿跨过门限的时间比下降沿晚。结果,边沿交叉的直方图如图8示(蓝色)呈现出两个不同的峰值分布。
2. 波形的判定门限高于或低于应该值:波形已经均衡了上升时间和下降时间,但判定门限没有设在50% 振幅点上。
码间干扰(ISI)
ISI源自由于数据相关效应和色散导致的边沿响应变化。由于连接器、电缆以及通道的信号转换带来的反射、驱动器和接收器的有限带宽造成的抖动是码间干扰的主要成因。其主要特点表现在对码型的依赖性上。如图 9示,眼图中的每个轨迹代表不同的码型,与其相对应,每个不同的码型在50%交叉点都有其各自的直方图分布(表现为残留的随机抖动)。
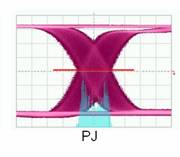
图7
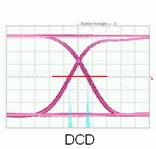
图8
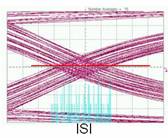
图9
综合考虑
在系统器件的定时方面,数据通信和电信技术并不相同。在同步系统中,如SONET/SDH,系统器件同步到公共的系统时钟。在信号通过网络传送时,不同器件生成的抖动会通过网络传播,除非对器件中传送的抖动提出严格的要求,否则抖动可能会无限制地提高。在异步系统中,如千兆位以太网、PCI Express和光纤通道,器件定时由分布式时钟提供或从数据转换中重建的时钟中提供。在这种情况下,必须限制器件生成的抖动,但从一个器件转移到另一个器件上的抖动则不太重要。不管是哪种情况,底线是系统的工作性能如何,即误码率。
器件生成的固有抖动称为抖动输出。如前面所述,其主要来源可以分为两个:随机抖动(RJ)和确定性抖动(DJ)。抖动分布是RJ和DJ概率密度函数的卷积。
图 10 单个时点的抖动、正弦周期抖动和随机抖动相结合,导致误码的实例。
Ideal Transition Edge: 理想的转换边沿
RJ Smeared Edge: RJ模糊的边沿
DJ Smeared Edge: DJ模糊的边沿
很重要的一点是,要理解抖动分布是由所有抖动源的卷积赋予的。为直观地认识抖动,我们考察一下从‘0’到‘1’的逻辑转换,如图 11b所示。标有‘x’的样点距理想转换边沿右面位周期的一半。现在,增加幅度为A的正弦DJ。在波的顶部,边沿从理想边沿朝着样点移动距离A。然后,根据高斯分布模糊边沿的位置,增加RJ。如果边沿移到样点的右面,那么逻辑‘1’码被错误地标为‘0’。在这种情况下,码边沿抖动经过样点的部分时间决定着BER。如果已知抖动原因,则可以计算BER。在本例中,抖动是RJ及PJ的一个来源,PJ移动边沿距离A及呈高斯分布的区域(图 11a中的阴影部分),移到样点右面的概率决定着误码概率。这展示了RJ和DJ分布怎样一起卷积,即一种原因的效应叠加在另一种原因的效应之上,直到考虑了所有原因。
识别不同类型的抖动来源,可以减少设计层次的问题,因为不同的器件以不同的方式生成抖动。例如,发射机主要生成RJ。外部调制的激光发射机生成的大多数抖动是由激光器和主参考时钟的随机抖动导致的。相反,接收机生成的绝大部分抖动是DJ,这源于导致ISI的前置放大器和后置放大器连接的AC耦合等因素。直接调制激光发射机受到RJ和DJ的影响。介质采用两种方式:光纤从色散中增加DJ,从散射中增加RJ;传导介质从有限带宽中增加DJ,与低频和多个反射相比,高频的衰减要更高。
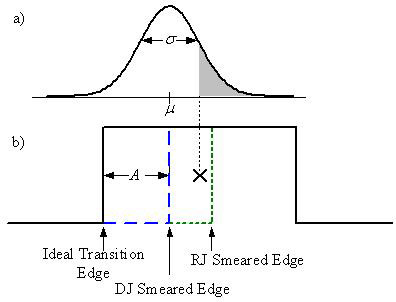
图10
相关推荐

高速数据的抖动
2008-07-30
在线研讨会
焦点