智能电源和高级数字信号控制器(DSC)
占空比大于50%时,您可能会遇到电流模式稳定性问题。可以通过PID软件轻松处理此问题,该软件会设置所需的电流,因此调节DAC值无关紧要。这就使得斜率补偿的数字实现比模拟技术容易得多,后者需要与PWM脉冲同步的锯齿波发生器以及将锯齿波加到反馈电流上的求和点。
这一过程的结果就是简单的电流模式SMPS系统,它使用廉价的低MIPS DSC实现1 - 2 BIPS处理器以穷举方式实现的操作。由于处理器只需在下个脉冲开始前计算新的所需电流,因此处理器有足够空闲时间完成其他任务,如通信、系统监控以及软启动/上电序列、故障检测和恢复之类的决定性功能。
您可以用Microchip的SMPS和数字电源转换系列之类的DSC实现以上设计,包括dsPIC30F202X,它带有高分辨率数字PWM发生器、一个额定每秒200万次采样的ADC、带有相关的10位参考DAC的高速模拟比较器以及支持高性能30 MIPS DSP的控制器。
SMPS设计中PWM外设的重要性
电源的规格决定应用中要使用的拓扑结构。不同的拓扑结构意味着必须具有数量众多的PWM模式,包括标准、互补、推挽式、多相、变相、电流复位以及电流限制模式。
电源设计人员必须正确理解术语“PWM分辨率”的含义。如果PWM模块分辨率不足,控制系统(硬件或软件)会使PWM输出上下抖动,以达到所需的平均输出。在电源应用中,PWM抖动会造成纹波电流,导致控制进入一种不适宜的工作模式,称为“极限循环”。选择PWM分辨率足够高的DSC以满足系统要求,使之不会进入“极限循环”工作模式,对于电源设计人员是很重要的。
从电压采集和电流测量到输出具有新占空比值的PWM控制信号之间的时间称为延时。随着延时缩短,控制环变得更稳定,响应也更快。部分DSC的PWM模块只能在完整的PWM周期结束时接收新占空比数据。从软件计算新占空比值到PWM模块接受数据之间的滞后增加了控制环延时,降低了其稳定性。因此,最好使用带有PWM模块的DSC,它会立即接受和处理新的占空比数据。
ADC要求
一些模拟电路知识在设计使用DSC的智能电源时可能会有用。考虑一个向控制环路提供系统状态反馈的片上ADC。传统ADC设计采用如下假设:ADC值以组的形式采集和处理。例如,对于音频处理和工业控制系统中的ADC,此方式通常可行。分组采样会导致处理器负荷在组内达到峰值,增加控制环路的延时。
SMPS电路中经常发生这种现象,即要采样和转换的模拟信号并不总是存在或足够大。信号只有在PWM周期的特定点才有效。因此,标准的ADC模块可能会由于采样时序不准确而错过需要的数据。SMPS中需要的就是提供独立采样/保持电路的ADC模块。这让DSC能够在精确的时间监控电压或电流,使事件瞬时信号的采样成为可能,并节约了系统成本。更妙的是,有一个可异步采样的板载ADC,这样电源就可以支持工作于不同频率的多个控制环。有此要求的应用示例包括功率因数校正[(PFC),70 kHz)]和直流-直流电源转换(250 kHz)。
模拟比较器改进数字SMPS设计
由于ADC不能连续监控信号,采样的处理速度最高只能达到板载ADC的额定采用速率,单位为每秒百万次采样(MSPS)。有些DSC具有模拟比较器,能释放处理器和ADC去执行其他重要任务。例如,可以用类似于传统线性电源控制器直接控制PWM占空比的方式将模拟比较器用于电流控制。模拟比较器也可以独立监控电压或电流过高的情况。
为演示这一功能,假定电源转换DSC上的参考DAC和模拟比较器能实现从测量电流到PWM更新之间大约25 ns的延时。通常情况下,从检测到模拟电压到比较器修改PWM输出之间的时间是大约25 ns。这一响应时间短于通用DSC使用“查询”技术所用的时间,后者根据条件变化通过各自的片上ADC和处理器修改PWM输出。
事实上,电源转换DSC上的参考DAC和模拟比较器帮助实现逐周期的电流限制,这是电流模式控制所必需的。
SMPS设计中的PID算法
使用PID算法时,将实际输出电压与所需输出电压相比的比例、积分和微分误差结合起来,控制PWM占空比。电压和电流模式控制环中都可以使用PID算法。
您可能会认为,处理涉及这些DSC的类DSP架构需要复杂的DSP编程技巧。但是,对于熟悉的单片机编程环境中提供DSP功能的某些DSC(例如上面提到的dsPIC® DSC),情况并非如此(见以下图9中列出的示例代码清单)。
如图8所示,PID控制环是控制软件的核心。尽管该软件通常很小,但执行速度很快,经常可以每秒迭代数十万次。由于PID软件程序的迭代速率很高,要求程序尽可能高效,以达到最佳性能。使用汇编器是确保代码紧凑的好方法。
此外,PID控制环可由ADC按固定时间中断。任何可在控制环空闲时执行的系统功能都应如此,以减少PID控制软件不必要的开销。诸如升压/斜压、误差检测、前馈计算和通信支持程序等功能可在控制环空闲时处理。
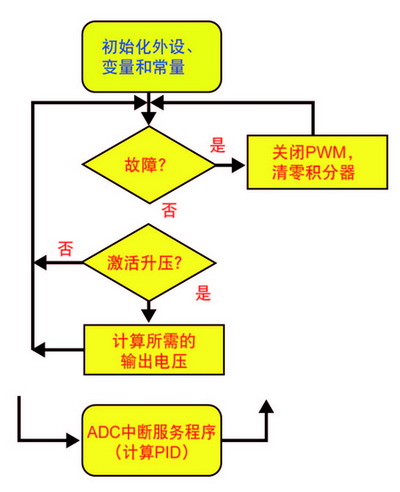
图8:控制软件结构
SMPS软件将由ADC中断驱动的PID环作为其对时限要求最严格的部分,从而实现控制算法。因此,作为一条经验法则,PID软件占用处理器带宽的比例不得超过约66%,以便留出计算资源分配给要在控制环空闲时执行的软件。
假定本例中PID环(由30条指令组成)的执行速率为30MIPS,则执行时间约为1 µs。如果迭代速率为500 kHz(2 µs),则PID将占用一半的可用处理器带宽,即15 MIPS。
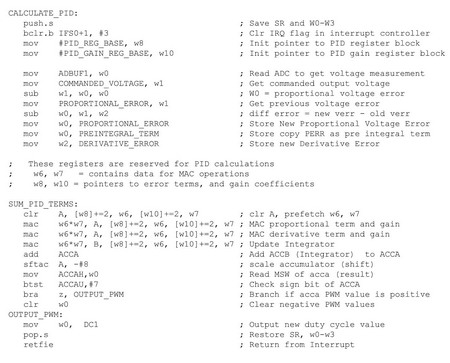
图9:示例代码清单
该代码段说明了数字模式降压转换器的PID控制环。对于多数SMPS拓扑结构,PID软件不变,但设计人员可能要更改外设模块的初始化代码。
结论
今天,新技术使得电源设计人员能够实现数字环控制,方便地加入新功能并完成特定的设计。通过选择适当的架构(如DSC),设计人员无需复杂的DSP编程技巧也能做到这些。而且,DSC使用熟悉的板载模拟外设元件和软件,使现在的设计人员可以快速、低成本地将更多智能化功能融入其电源设计。
在电源中加入更多智能化功能,减轻了设计人员的工作负担,使其专注于创新和开发任何想象得到的拓扑结构。其他好处还包括:增强的定制功能;通过固件(而非硬件)对设计进行更改;更好地保护了知识产权(IP)。