TMS320F2812在多段液压机械无极变速器中的应用
1 引 言
液压机械无极变速器由液压传动和机械传动有机组合成,兼有液压传动无极调速与齿轮传动高效率的特点,是一种功率较大的无极传动形式,可以用在履带车辆或大功率轮式车联上。多段液压机械无极变速器的液压传动部分与液压机械无极变速器液压部分没有区别,但机械传动采用带换档变速的传动结构,这样增加变速器的变速范围,提高传动效率。
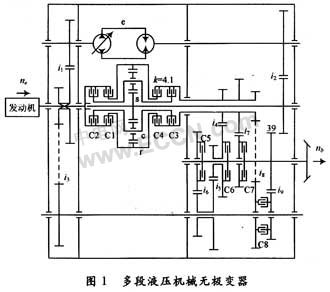
图1是多段液压机械无极变器的一种形式。液压元件a和b构成了液压传动的主体e;元件s,c,r构成差动轮系,c1~c8是离合器,他们与后续的齿轮传动系统构成多挡传动。通过调节液压传动部分的排量可以在单段中实现无极变速,对齿轮传动进行换挡可以实现多段变速。
2 TMS320F2812结构与特点
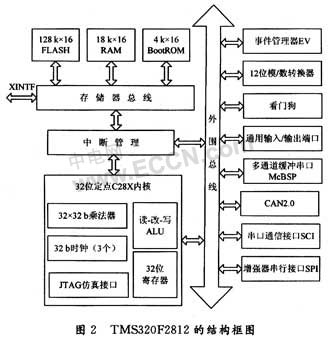
TMS320F2812是美国德州仪器公司TI最新研制的一代32位定点数字信号处理器(DSP)芯片。每秒可以执行150 M条指令,具有强大的数据处理能力,片内存储器资源包括:128 k×16 b POM,18 k×16 b的数据存储器SARAM、片内128 k×16 b的FLASH程序存储器、4 k×16 b片上Boot ROM,1 k×16 b的一次可编程存储器OTP。同时集成丰富的外设资源,主要包括模数转换模块(ADC)、事件管理器模块(EV)、串行外设接口模块(SPI)、串行通信接口模块(SCI)、CAN控制器模块(eCAN)等。其结构框图如图2所示。
3 控制器硬件设计
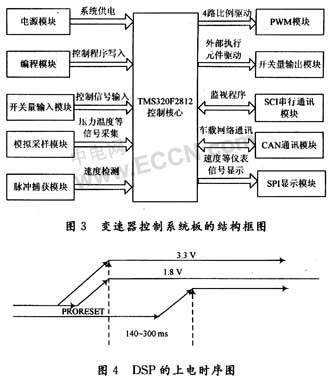
图3为基于TMS320F2812型DSP设计的变速器控制系统板的结构框图。
TMS320F2812由于强大功能与丰富的外设资源,非常适合使用于工业控制领域。但是其自身的特点决定进行系统设计时,要注意电源的设计,启动方式,信号的处理等问题。
(1)电源模块
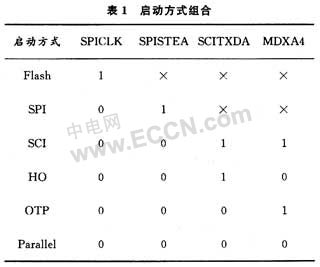
TMS320F2812内核电压为1.8 V,外部I/O电压为3.3 V。内部FLASH具有低压烧写功能。但需要单独且优质的3.3 V供电。同时芯片对于上电时序有一定的要求。所以采用TI公司的电源芯片TPS676D318。他是单输入双通道输出电压变换器。输入电压为5 V,输出分别为1.8 V和3.3 V。同时通过MOS管BSS138控制电压变换时序。使DSP的FLASH与外部I/O先上电,然后再对内核上电,当所有电压达到稳定值后,延时140~300 ms的时间,将控制板上的输出使能信号PRORESET拉至高电平,这样能够保证系统正常工作。图4为DSP的上电时序图。
(2)系统的启动模式
TMS320F2812有6种启动方式,也就是从不同的存储空间启动程序。这样就可以满足不同的控制系统的要求。这6种控制方式分别为FLASH,SPI,SCI,HO,OTP与Parallel。这些启动方式可以通过对DSP的SPICLK,SPISTEA,SCITXDA,MDXA四个控制针脚的组合来确定使用那一种控制方式。如表1所示给出不同的启动方式对应的组合方式。
本系统采用从内部FLASH启动的方式,所以采用表1中第一种组合方式。
(3)信号的处理
TMS320F2812具有56路,可编程,多用途通用I/O。其有着丰富的资源,但是他们的驱动电压最高为3.3 V。而本控制系统的外部控制电路输入信号为5 V,输出驱动信号为12 V,需要对信号进行电平转换处理,同时注意信号的隔离,提高抗干扰能力。控制系统用到DSP的A/D转换模块。A/D功能单元精度高、转换速度快。但是对噪声干扰比较敏感。所以控制板对信号的处理很复杂。对控制板的设计应该遵循以下的设计思想:电源系统要尽量简化,提高整个系统的可靠性与抗干扰能力;模拟电路的电源与数字电路的电源要做相应的隔离处理。他们可以采用共地的方法,并在模拟地的引出点串接电感或是磁珠,进行滤波处理。另外在CPU的电源与地引入端加上大面积的复铜减小阻抗。同时控制板的设计采用多层板的设计方案,提高整个系统的稳定性与抗干扰的能力。
(4)控制器软件设计
控制系统软件设计方案采用C语言进行编程有以下几方面的原因:
①对于控制系统来说最重要的性能要求就是系统的可靠性与稳定性,用汇编语言直接对片上寄存器,标识位,数据存储区等直接操作,同时还包含了大量的跳转指令。对于大型的控制系统涉及大量的资源其稳定性不能保障。
②利用C语言进行程序容易将程序模块化,封装化,程序的结构更清晰,有利于维护与忧化。
③TI公司提供的程序开发工具CCS3.1支持C/C++。同时提供大量的基于C语言的程序库,使程序开发更加方便与便捷。
采用C语言开发系统,应遵循一下原则:
全局性 尽量保证系统个模块负载的均衡;
正确性 数学推导严密,尽可能利用试验验证;
结构化 软件设计做到层次化,模块化,封装化;
规范化 保证程序的易读性,移植性和可维护性。
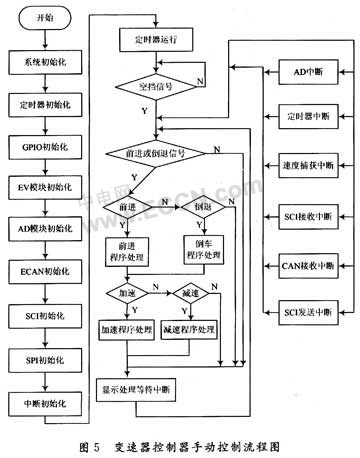
图5为变速器控制器的手动控制的系统软件的流程图。
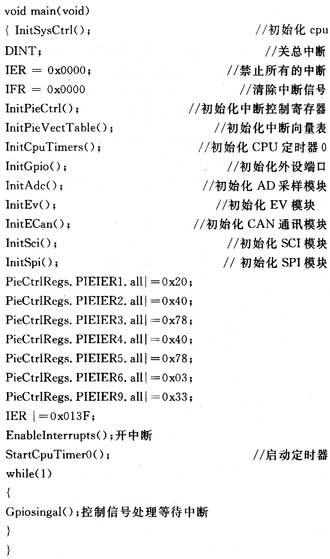
以下提供部分程序
4 结 果
完成控制系统的硬件与软件设计。通过试验能达到控制要求。在满足工作要求的情况下能比较准确地检测到速度、电压、压力、温度等信号,灵敏地响应控制信号,完成控制要求。