基于模糊-PI双模控制的永磁同步电机控制系统
1 引 言伺服电机自身是具有一定的非线性、强耦合性及时变性的系统,同时伺服对象也存在较强的不确定性和非线性,加之系统运行时受到不同程度的干扰,因此按常规控制策略很难满足高性能伺服系统的控制要求。在改善PMSM转速和转速脉动性能的研究方面许多专家提出了自适应控制、滑模变结构、神经网络控制、遗传算法控制或它们当中几个相结合的控制算法。但以上的大多数控制算法,由于其算法复杂、实时性差致使在实际应用中受到了很大限制。传统的PI控制策略,其控制算法简单、易于实现,能够获得较高的稳态精度,已被广泛应用于工程实践中。然而,要达到预期的控制性能指标,必须依赖于控制系统精确的数学模型,不仅如此,系统的动态响应和抗扰动性能均不够理想。为此,该项目结合现代控制理论的新发展,引进先进的“复合型控制策略”,应用模糊集合理论结合PI策略,建立模糊PI双模控制器,用于速度环、位置环和电流环的三环控制,使电机控制系统中具有不需要电机参数和对参数变化不敏感的优势,能够改善伺服控制系统的动态性能和抗干扰性能以及对系统参数变化的鲁棒性,经仿真并与常规PI控制进行比较,证明了该方法的可行性和有效性。
2 PMSM数学模型及矢量控制原理
矢量控制的基本思想就是在普通的三相交流电动机上设法模拟直流电动机转矩控制的规律,在磁场定向坐标上,通过坐标变换将电流矢量分解成产生磁通的励磁电流分量和产生转矩的转矩电流分量,并使两分量相互垂直,彼此独立,然后分别进行调节。这样,交流电动机的转矩控制,从原理和特性上就与直流电动机相似了。因此,矢量控制的关键仍是对电流矢量的幅值和空间位置的控制。
2.1 数学模型
在dq旋转坐标系中PMSM的电流、电压、磁链和电磁转矩方程分别为:
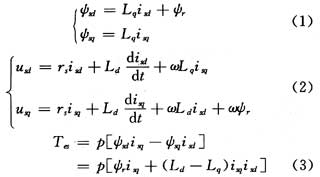 |
从上式可以看出,永磁同步电动机的电磁转矩基本取决于定子交轴电流分量和直轴电流分量。
本文采用isd=0的控制方式,所以有:
 |
式中,ψr为转子磁钢在定子上的耦合磁链;LdLq为永磁同步电动机的直轴、交轴主电感;isd,isq为定子电流矢量is的直轴、交轴分量;usd,usq为定子电压矢量us,的d,q轴分量;ω为转子角频率。
显然,ψr为常数,转矩只与定子电流的转矩分量isq成正比,实现了解耦;同时,由于是本课题用到的是表面式永磁同步电机,电机参数与Ld,Lq相等,isd=0方式可以保证用最小的电流幅值得到了最大的输出转矩。即电磁转矩仅仅与定子电流的交轴电流分量成正比,定子电流合成矢量与q轴电流相等,这样一来,对同步电动机电磁转矩的控制就变得与直流电动机一样简单易行了。
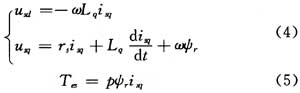
2.2 矢量控制的原理
图1为PMSM的矢量控制的原理图。经过坐标变换,把三相定子坐标系(abc坐标系)变换为转子坐标系(dq坐标系)。
 |
3 模糊-PI双模控制器设计
模糊控制是以模糊集合理论、模糊语言变量及模糊推理为基础的计算机数字智能控制,是在被控对象的模糊模型的基础上,用机器去模拟人对系统控制的一种方法,比一般的传统控制系统具有更优良的性能。模糊控制器实际上是一种非线性、基于规则的控制器,它不需要建立被控对象的精确数学模型,并且根据人类思维特性,比较容易建立语言控制规则。
传统的模糊控制器以系统误差e和误差变化ec为输入语句变量,具有类似常规的比例微分(ProportionalDifferential,PD)控制器的特性。由于PD控制器可以获得良好的动态特性,但无法抵消系统的静态误差。而传统的比例积分(PI)控制器具有很高的稳态精度,并且具有算法简单、稳定性好、可靠性高的优点。
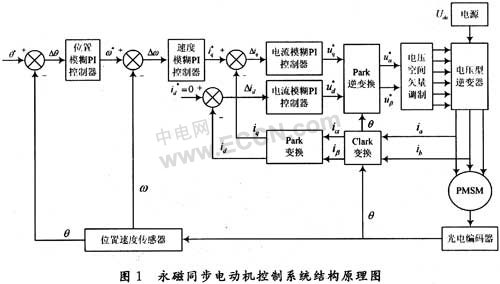
因此,本文结合模糊控制器与PI控制器的各自优点设计一种模糊-PI双模控制器。其由PI控制器和基本模糊控制器组成。基本模糊控制器主要完成对系统的非线性控制;PI控制器主要完成当系统的误差趋于零时,保持系统稳定状态和较小的稳态误差。两者的转换根据事先给定的偏差范围实现自动转换。PI控制器与模糊控制器相结合的双模模糊控制器的原理框图如图2所示。
 |
图中的特征识别主要是针对系统的误差而言:
(1)当∣e∣<es(es为误差绝对值的设定值)时,系统处于基本模糊控制器的控制模式,即控制量u为基本模糊控制器的输出,以实现控制器对系统的非线性控制。
(2)当∣e∣>es时,系统处于PI控制器控制模式,以克服当系统误差趋于零时,模糊控制器可能产生的震荡和稳态误差。
误差绝对值的设定es的选取要适当。es太大,基本模糊控制器作用的程度较大,要注意克服系统可能引起的震荡现象;es太小,基本模糊控制器作用的程度较小,它对系统的非线性控制作用不太明显。
3.1 模糊逻辑理论
模糊控制器设计所涉及的5个主要步骤为:模糊化、建立模糊推理规则、确定规则信度、选择关系生成方法和推理合成算法以及反模糊化。
以伺服电机位置环的控制为例:其输入变量为电机的位置误差和位差的变化率,输出变量为电机的输入电流。
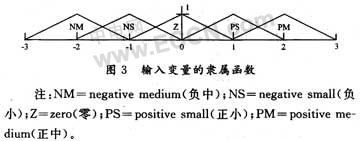
隶属函数部分定义了电机位置误差和误差变化率2个变量,这两个语言变量都包括了5个语言值:NM,NS,Z,PS,PM。2个输入变量论域范围相同,都是[-3,3],所采用的隶属函数也相同,并且每个隶属函数都选用等腰直角三角形隶属函数,位置误差、误差变化率和输出变量量化因子选为10,输入变量的隶属函数如图3所示。
 |
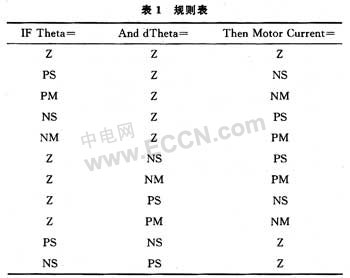
模糊规则表的建立:电机的位置误差(Theta)和位置差变化率(dTheta)作为模糊逻辑系统的输入变量。电机的电流作为模糊逻辑系统的输出变量,它将与PWM输出成正比例。这样,Thera、dThera和电机的工作电流根据如下的“if a and b,then c”规则,建立规则表,如表1所示。
模糊判决方法选取:模糊判决(反模糊化)方法采用区域重心法。
 |
3.2 模糊逻辑实现
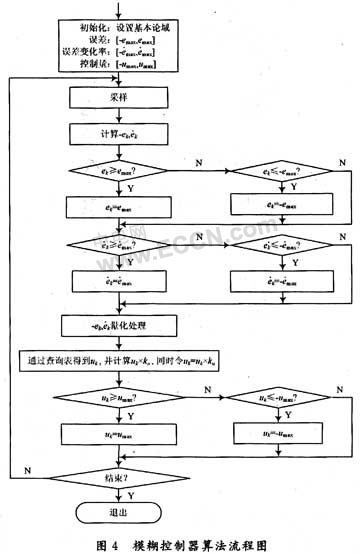
编程时,模糊逻辑计算中采用数组变量,这些变量在实现补偿的各个循环中可以进行修改。模糊控制算法分为三大模块:模糊化模块、模糊推理模块和逆模糊化模块。模糊控制算法流程如图4所示。
 |
4 仿真结果
利用Matlab/Simulink建立系统仿真模型,电机具体参数如下:Rs=2.78 Ω;Ld=Lq=6 mH;J=0.6×10-3(kg?m2);ψf=0.2 Wb;Pn=4;阻尼系数为0。
从图5中可以看出,采用模糊-PI控制实现的位置环调节器对位置的跟踪响应时间比较短,大约在0.09 s时就跟踪上了给定位置,而采用传统PI调节器则在0.14 s左右才跟踪上给定位置。
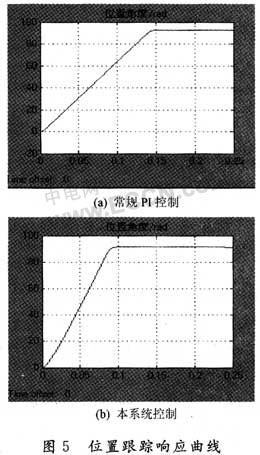 |
图6为空载时转速由0~400 rad/s时的响应曲线,在0.04 s时突加负载转矩6 Nm。
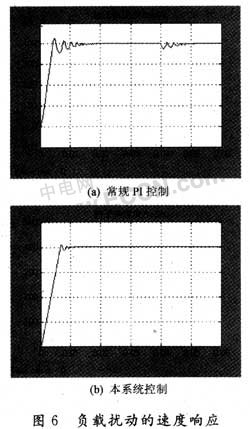 |
从图6中可看出采用模糊-PI控制实现的速度环调节器响应时间比较短,大约在0.01 s时就进入稳态,而采用PI调节器在0.02 s左右进入稳态。
5 结语
由仿真结果可以看出:模糊-PI控制下的位置环调节器提高了系统的跟踪速度,系统表现出良好的快速性。要比常规PI控制下的响应反应要迅速,快速达到稳态状态;采用模糊-PI控制器实现的速度环调节器提高了系统的响应速度;对于突加负载转矩PI调节器的速度响应有明显影响,模糊-PI控制对负载扰动几乎不受影响,表现出很强的鲁棒性。
其关键在于模糊-PI控制系统能够准确地识别误差的变化及其变化率,相应地对供给量作出切换调整,有效地克服了振荡,准确和及时地跟踪了负载的变化。仿真结果表明,系统采用模糊-PI控制器要比传统PI控制器具有更好鲁棒性、动态特性和稳定性能,提高了伺服系统的响应速度和控制精度。