基于ARM的嵌入式服务机器人控制器的研究
1 引言
随着人口老龄化进程的加快,更多老年人,尤其是地震和疾病致残的残疾人,都需要照顾。基于此,这里提出一种基于ARM的嵌入式服务机器人控制系统设计。该服务机器人的控制系统是机器人的神经中枢,因而其设计是机器人研究的核心。该控制系统通常以MCU、 DSP等为核心,采用上、下位机二级分布式结构。其中上位机一般为PC机,下位机为单片机或DSP等微控制器。但随着移动机器人的智能化,控制方法的发展,所需计算量增大,一般的单片机等处理器很难完成控制要求。而基于ARM的嵌入式服务机器人的控制器采用分层与模块化结构,充分体现可扩展性、可移植性的设计原则.同时具有低成本、低功耗、体积小巧、可靠性高、智能化高以及通用性等特点。
2 系统整体结构设计
图1为嵌入式控制系统的软硬件层次结构。
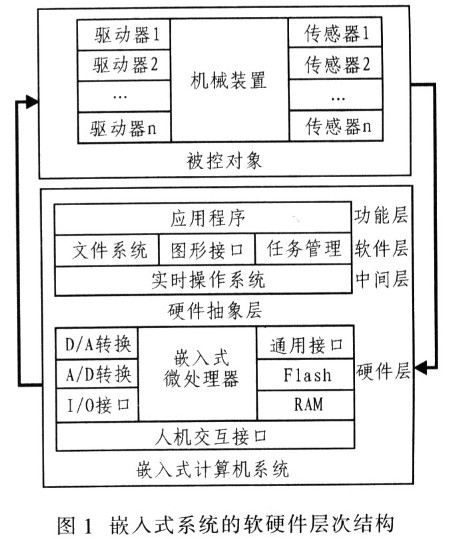
嵌入式系统是以应用为中心,以计算机技术为基础,软、硬件可剪裁,适用于应用系统,对功能、可靠性、成本、体积,功耗要求严格的专用计算机系统。嵌入式系统总体可划分为硬件和软件两部分。硬件由微处理器和外围的接口电路组成,同时还包括传感器及驱动器接口和被控对象(机械装置);而软件一般由实时操作系统及其运行的应用软件构成。其应用软件的功能层由基于RTOS的应用程序组成,用来控制被控对象。
3 系统硬件设计
服务机器人控制系统的硬件平台设计至关重要。首先它是用户控制逻辑的具体执行者,服务机器人的各种控制功能必须通过硬件实现;其次它也是实时控制系统软件移植和运行的硬件环境。这里采用部件模块化,接口标准化,互换性、扩展性好,可靠性高的硬件设计原则。
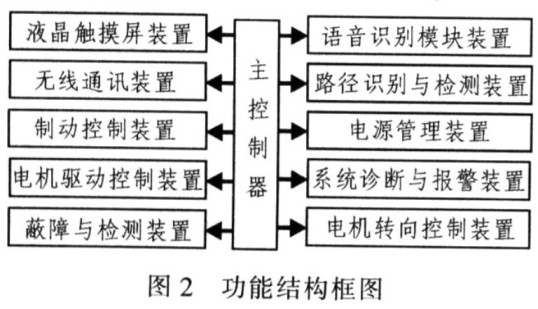
服务机器人控制系统主要用于实现控制服务机器人的导航、启动、停车、运行控制、路径规划、安全监控、远程控制计算机通讯及语音识别等功能。该控制系统主要由主控、导引、驱动、通讯、安全与辅助、语音识别、液晶触摸屏以及电源管理等单元组成。图2为其功能结构框图。
嵌入式处理器是整个硬件系统的核心元件,其性能好坏直接决定整个系统的运行效果,所提供功能的强弱直接决定嵌入式应用的适应范围和开发复杂度。嵌入式处理器一般具备以下特点:支持实时多任务操作系统;具有强存储区保护功能;处理器结构可扩展;功耗低。图3为基于ARM9的嵌入式系统的服务机器从主控制器模块结构。