基于虚拟仪器的雷达信号模拟系统
仪器驱动程序是实现仪器功能的控制函数和参数的集合。它是软件与仪器通信的桥梁。仪器都在出产时随产品附带了相应的驱动程序,而虚拟仪器软件建立在仪器驱动程序之上[6],通过接收用户操作面板传来的用户设置参数,实现丰富的信号设置功能,完成自动控制的任务。 通过调用仪器驱动程序的接口函数 [7], [8], [9]可以设计出符合功能需求的系统。
图4说明了软件的流程。软件的功能包括仪器的寻址,仪器间的相参设置,重采样时钟设置,每一级输出功率配置,触发源的选择,触发脉冲PRF值的配置,输出信号中心频率的配置,信号波形的建模,数据生成和存取,以及波形的输出回放控制。其中波形回放控制部分是一个子进程,其流程图如图5所示。它的功能是通过调用任意波形发生器驱动程序的函数,控制任意波形发生器的波形回放过程。两个分支分别实现单一脉冲波形的输出和脉冲波形序列的输出。

图4 虚拟仪器程序执行流程图
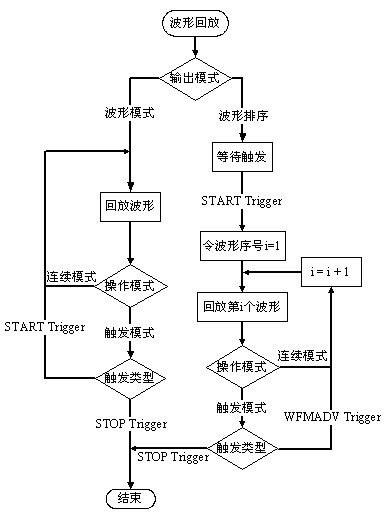
图5. 波形回放流程图
图6是任意波形发生器在单一波形输出模式下时,在PRF = 2000KHz的触发脉冲控制下,输出的I/Q两路线性调频基带(-300~+300MHz)模拟信号在数字存储示波器上显示的图像。触发脉冲宽度为300us,脉冲波形宽度为16us。

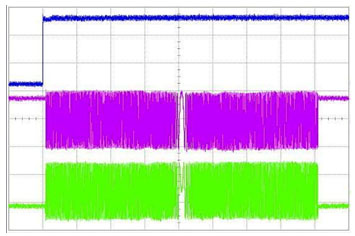
b. 时间轴分辨率2.00us/格
图6. 线性调频信号及触发脉冲
4 结束语
基于虚拟仪器的雷达信号模拟系统较之以往的专用雷达信号系统有以下几个创新点:
1) 通用性:波形信号形式,中心频率,功率,脉冲重复频率等都可以进行很灵活的设置。
2) 软件定义系统功能,方便系统的升级,容易集成其它仪器仪表到系统中,扩充系统功能。
3) 充分利用实验室资源,降低研发成本和周期,适用于雷达系统新体制的研发和实验阶段
参考文献
[1]. 王俊, 迟钦河, 基于虚拟仪器技术的测速雷达信号处理系统, 微计算机信息, 2003, 19卷
[2]. Agilent Technology , N
[3]. Agilent Technology, E8267D PSG矢量信号发生器技术资料
[4]. Agilent Technology , 81110脉冲码型发生器技术资料
[5]. Robert Helsel, HP VEE 可视化编程 第三版, 中国-惠普DSP技术研究中心, 清华大学出版社, 1999
[6]. 赵会兵, 虛拟仪器技术规范与系统集成, 清华大学出版社, 2003
[7]. Agilent Technology, N
[8]. Agilent Technology, E8267D PSG Signal Generators Programming Guide
[9]. Agilent Technology,