ICL7135与PIC单片机在温度变送器中的应用
引言
在智能仪表设计中,经常用到 A/D 转换器。在常用的 A/D 转换中,7135 应用最为广泛, 它具有 41/2 位 A/D 转换精度,抗干扰能力强,价格低廉,主要用于检测参数的测量显示, 在智能仪器仪表中,常利用其 A/D 转换特性,与单片机串行连接,通过简单的人机界面实现
对A/D 转换数据的智能控制。本文以 PIC 单片机与 ICL7135 的实际工程应用为例,介绍一款智能温度控制仪表在温度变送器中的应用。
1 PIC 单片机
PIC 系列 8 位 CMOS 单片机具有独特的 RISC 结构,数据总线和指令总线分离的哈佛总线(Harvard)结构,使指令具有单字长的特性,且允许指令码的位数可多于 8 位的数据位数, 这与传统的采用 CISC 结构的 8 位单片机相比,可以达到 2:1 的代码压缩,速度提高 4 倍。
PIC 有优越开发环境、彻底的保密性、PIC 以保密熔丝来保护代码,用户在烧入代码后熔断熔丝,别人再也无法读出,除非恢复熔丝、自带看门狗定时器,可以用来提高程序运行的可靠性。在本工程项目中选用了 PIC 中档单片机 PIC
2
7135 采用高阻抗差分输入方式,总失调电压小于 10μV,其 A/D 转换器采用双积分式, 共分 4 个阶段:自动调零,输入信号积分,标准信号反积分,积分器归零。其当个转换过程如图 1 所示。

由图 1 可以看出,7135 在对输入信号进行积分时,其 BUSY 信号线由低向高跳变并一直保持高电平,直到标准信号反积分结束时才跳变到低电平。在此过程中,对输入信号的积分一般保持 10001 个时钟脉冲,而在满量程的情况下,反相标准积分值为 20001(当 Vin="2Vref" 时),对于不同的模拟量输入,7135 反向标准积分脉冲数不同,BUSY 信号的高电平宽度也不 同,且反向积分脉冲数正比于输入信号幅度,与测量结果有一一对应关系。在转换过程中,7135 提供一输入信号极性判断引脚 POL,当输入(Vin+-Vin-)为正值时,POL 信号为高电 平,(Vin+-Vin-)为负值时,POL 信号为低电平。
3 7135 与 PIC 单片机的串行连接
由7135 的转换原理可知,可以通过脉冲计数的方式获得测量的结果,且只需要 3 条控 制线 CLK,BUSY,POL。Microchip 推出的 PIC 系列单片机具有驱动能力大,抗干扰能力强,价格适中等优点。其推出的 PIC
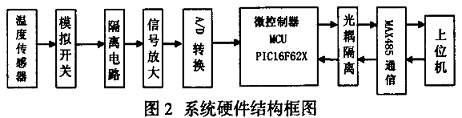
在实际应用中,监测的对象为玻璃熔炉的温度,采用热电偶将信号采集到变送器。作为温度变送器还必须要考虑环境温度的影响。其次,还要考虑到器件的温度漂移,必须在后期 得到的数据对这两个干扰量进行处理才能得到真实的温度值。因此在模拟量的输入部分有三个量需要采集,通过多路模拟开关隔离,再将信号送给运算放大器后进行 A/D 转换。在 A/D 转换部分,由于 ICL7135 本身没有自带的参考电压,因此设计中必须配以精确的参考电压源。
实际应用中采用的是 TL431 可调电压基准,应用中达到了生产要求,效果良好。在变送器的输出部分则需加以隔离并且 MAX485 的输出端接以上,下拉电阻。
定时器 T1 的时钟和 7135 的时钟不是同一个输入,T1 的时钟为系统时钟的 1:128 分,而 7135 的 CLK 为 125KHz,为 CPU 引脚输出的方波脉冲。7135 的 BUSY 脚接 CPU 具有电平中断功能的引脚,这样当 BUSY 为高时便开始计入脉冲数,直到一次转换完毕。对热电偶通道所测得的数据根据其电压—温度特性表进行处理后得到其 温度值,对温度飘移则视 POLARITY 的极性而定,若为正则将其用热电偶温度值减去,否则则加。环境温度直接相加。温度数据处理完毕等待上位机发送指令上传即可。