基于DSP控制的新型全桥ZVS PWM DC-DC变换器
摘 要: 针对传统全桥ZVS PWM DC-DC变换器零电压开关范围窄、占空比丢失严重,转换效率较低等缺点,提出了一种新型的全桥ZVS PWM DC-DC变换器。 在一次侧串入耦合电感和隔直电容,使变换器实现了较宽的输入电压和较大的带负载能力。分析了这种变换器的工作原理、零电压开关的实现,推导了耦合电感的选择依据。并且采用TMS
关键词: 全桥DC - DC变换器;零电压开关;数字控制
目前,全桥PWM DC - DC变换器在电能变换等场合得到了广泛的应用。 它通过移相控制方式,使功率开关管实现了软开关导通和关断,减小了开关管损耗,提高了整机频率,提高了功率密度,保持了恒频控制,减小了开关管的电流及电压应力,可实现高频化。 但它也存在滞后桥臂零电压开关范围窄、占空比丢失严重、转换效率较低等不足之处。
本文提出了一种新型的DC - DC变换器,即在基本变换器变压器的一次侧串入一个耦合电感,在耦合电感与两个桥臂中间分别串入一个隔直电容,构成新型全桥ZVS PWM DC - DC变换器,使变换器在较宽的输入电压及较大的负载范围内变化时,均可以在较高的技术指标下正常运行。 分析了变换器的软开关工作模式,设计了基于TMS
变换器原理分析
图1为新型全桥ZVSPWM DC - DC变换器的原理图。初级采用全桥结构,次级使用全波整流,为减小副边的导通损耗,副边反并联续流二极管DX。此变换器在变压器初级用一个耦合电感来实现开关管的ZVS。在耦合电感和两个桥臂之间分别串联了一个隔直电容,这两个电容可以用来防止耦合电感及变压器铁芯饱和以及偏磁。变换器仍然采取移相控制方式。
在一个开关周期中,此变换器共有12种开关模态。在分析之前, 将电路进行如下简化:假设输出滤波电感Lf 的电感值足够大。因此可等效为幅值等于输出电流Io 的恒流源。电容Cb1 和Cb2 的电容值足够大,可将其看作恒压源Vcb1 和Vcb2。因为在一个开关周期中, 耦合电感和变压器的电压平均值是零,并且每一个桥臂开通时间占整个周期的1 /2。所以Vcb1 和Vcb2 幅值均为Vin /2,即Vcb1 =Vcb2 = Vin /2。为了进一步简化分析,认为所有MOS管、二极管均为理想器件。 除此之外, 耦合电感和变压器的漏感以及变压器的励磁电感均被忽略。耦合电感LC 被看作变比nLC = 1的理想变压器且本身的励磁电感LM 与其并联。简化后的等效电路如图2所示。图3为此变换器的主要工作波形。

下面对变换器的各个模态进行分析:
1) t0 ~ t1 时间段
Q1、Q3 闭合, i1、i2 流过相应的开关管、阻断电容、耦合电感LC , 进入变压器TR的初级线圈。同时,输出电流Io 流过变压器副边绕组。 ip = i1 +i2 = io / nTR , nTR = Np /Ns 是变压器的变比, ip 是流过变压器原边的电流。 在这个时间段, A、B 两点电位相同都为Vin /2 (因为Vcb1 = Vcb2 = Vin /2) ,所以电压VAB = 0。 又由于VAB = VAC + VCB = 0,而VAC = VCB ,所以必有VAC = VCB = 0。 即A,B, C三点电位相同。 故初级线圈的电压Vp = Vin - Vin /2= Vin /2。 因为VAC = VCB = 0。 所以iM 为恒值。 又因为耦合电感变比nLC = 1,所以电流i3 = i4 = ip /2,从图2可以看出i1 = ip /2 + iM 和i2 = ip /2 - iM。当t = t1 时, Q1 关断,因为电容C1 上电压为零,所以Q1 可以实现零电压关断。 电流i1 从开关管Q1转到输出电容C1 上。
2) t1 ~ t2 时间段
当Q1 关断后, i1 给C1 充电, C2 放电,A点电位下降,当给电容C1 充电到电源电压Vin , 而电容C2 放电到零时, A 点电位也从Vin /2 下降到- Vin /2, 由于此时B点电位仍然为Vin /2,当t = t2时刻, A、B两点电压VAB 从零下降到- Vin , 由耦合电感的耦合关系可以得知此时C点电位为零,故电压Vp 也下降, Vp 从Vin /2下降到0。 在这个时间段内电流iM 几乎处于最大值状态,由于i1 = ip /2+ iM ,故i1 也是在最大值状态, 电路有足够的能量将电容C1 上电压充电到电源电压,电容C2 上电压完全放电到0。

3) t2 ~ t3 时间段
当C2 放电结束后,反并联二极管D2 导通,之后开通Q2 ,开关管Q2 可以实现零电压开通。 由于VAB = - Vin ,所以iM 以Vin /LM 斜率下降。 在此期间变压器初级电流ip 恒定不变, 其值为Io / nTR , 因i1 = ip /2 + iM 和i2 = ip /2 - iM ,所以电流i1 和i2以同一速率下降和上升。 当t = t3 时刻, iM 下降到0。
4) t3 ~ t4 时间段
iM 下降到零后,由于LM 上的电压VAB = - Vin ,所以电流iM 以Vin /LM 斜率反方向上升,结果电流i1 继续下降, i2 继续上升,为滞后臂的零电压开关做准备。电路中电流的方向除iM 反向外, 其他电流方向不变。当t = t4 时刻,励磁电流iM 以反方向达到最大值, 即电流i1 达到最小值, 而电流i2 达到最大值, 此时将开关管Q3 关断,电流i2 从开关管Q3 转移到输出电容C3 上,在此期间,输出电容C3 被充电,开关管Q4 的输出电容C4 被放电。
5) t4 ~ t5 时间段
当电容C3 上的电压由零上升到电源电压时,电容C4 的电压也以同样速率从电源电压下降到零,B点电位从Vin /2下降到- Vin /2。而此时A 点电位依然是- Vin /2, 所以电压VAB 从- Vin 变到零。前面已经分析过,当A、B 两点电压VAB 为零时,A、B、C三点电位一定相同。所以此时电压Vp从零下降到- Vin /2。 在t = t5 时刻, C4 放电结束,D4 导通,此时开通开关管Q4 ,则Q4 实现了零电压开通。在这个时间段内电流iM 几乎处于负的最大值状态,由i2 = ip /2 - iM ,故i2也在最大值状态,电路有足够的能量将电容C3 上电压充电到电源电压,电容C4 上电压完全放电到零,使滞后臂完全实现零电压开关。
6) t5 ~ t6 时间段
电压Vp从零下降到- Vin /2,这样迫使负载电流流过DR2。而DR1 关断。如果变压器TR和耦合电感LC 的漏感是零。这种变换将是瞬间完成的。但是,由于变压器初级和次级两侧不可避免的存在各种各样的寄生电感,所以当初级绕组的电压改变符号时,负载电流的换向不是瞬间完成的。
后面6个模态和上述6个模态基本原理是相同的,这里不再赘述。
ZVS的实现及耦合电感值的选择
根据以上分析可见,变换器超前桥臂开关管能在很宽的输入电压范围以及很宽的负载范围内实现ZVS,因为存储在输出滤波电感中的能量能够反射到原边;而对于滞后桥臂,由于换流过程使得输出滤波电感与原边隔离,不能将能量反射到原边,故其ZVS的实现则要通过存储在耦合电感中的能量实现,且必须满足式(1) :

式中: LM 是耦合电感值, C是滞后桥臂开关管结电容, CLC 是耦合电感的寄生电容, CTR 是变压器的寄生电容。 忽略CLC 和CTR ,式(1) 可简化为
![]()
由式(2)可见,在空载的情况下,滞后桥臂要实现ZVS,则能量全由存储在耦合电感中的能量提供。而t8 - t10 时段就相当于空载阶段, 时间长大约为(1 - D) TS /2,且输入电压值最大,则有
![]()
由式(2)和式(3)可推知
![]()
由式(4)可推得
![]()
式中: fS 为开关频率, Vin (max) 为输入电压最大值。这样便为耦合电感的选取提供了依据。
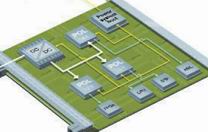
变换器DSP控制系统
数字控制方式具有控制灵活、不存在温漂问题、控制精度高、控制功能强等优点。 图4为该变换器的DSP控制系统框图。电流和电压等模拟反馈信号由采样保持器采样,经过A /D转化为数字信号后输入微处理器CPU进行P ID调节运算,结果通过数字PWM单元处理,产生的PWM信号触发主电路功率开关,实现占空比调节,从而向负载端提供设计所要求的电压值。

软件所要实现的功能包括:采集DC - DC变换器的输出电压和电流信号,进行A /D转换;数字PID调节器的计算,调节PWM脉冲的占空比;产生逆变桥4个开关管的移相PWM逻辑驱动信号,开关频率为100 kHz。
本设计采用电流型PWM 的双闭环控制方式。内环是电流环,外环是电压环。 两个控制环都是经检测、采样保持、P ID调节环节实现闭环的。应用模拟- 离散法来设计变换器的数字控制系统,先对整个系统完全用连续系统的设计方法来设计,待确定了校正装置后,再用合适的离散化方法将连续的校正装置离散处理为数字校正装置,以便于微处理器来实现。
实验结果分析
实验电路的主要电量参数为: Vin = 200 V,f = 100 kHz, Vout = 24V, Io =
数字信号处理器TMS
图7、8表明此变换器变压器制作比较成功,因为副边电压形状与原边电压形状基本相同,而且变压器次级绕组的上下两端的电压波形非常对称。

实验测得电压纹波在20 mV左右,见图9。可见输出效果较好。根据实验测得相关数据可以做出效率曲线图,效率见图10。可见满载时达到90.2%。
改变Vin ,当Vin 从150 V上升到250 V时,其输出电压Vo 不变化,而开关管、变压器等电压瞬时值发生变化,但超前桥臂及滞后桥臂依然工作在零电压开关状态。

结 论
这种新型的全桥PWM DC - DC变换器能够实现超前桥臂和滞后桥臂的ZVS。此电路结构简单,控制简单,由于耦合电感和隔直电容的作用,使得此变换器有很宽负载范围,且在较宽的输入电压变化情况下变换器也工作的零电压状态。 实验证明,运用DSP数字控制具有控制灵活、无温漂、控制精度高等优点,且对提高变换器的工作稳定性等起到了重要的作用。
相关推荐