利用CAP实现超宽带流媒体访问控制器
在医疗过程中,要取出病患喉咙里的异物或插入呼吸管,医生往往得使用所谓的喉镜。喉镜是一种检视病患喉咙的仪器,由一个手柄和一个压舌板组成,如图1所示。为便于检查喉咙,这种仪器的形状必须符合人体工学,而且易于操作。使用时,医生把仪器插入病患口腔,然后抬起下端并轻柔地往上推进。这种方法可能会对病患的门牙造成伤害,引起一些并发症。此外,大约有20% 的病患会出现呼吸困难的意外现象,因而无法使用仪器。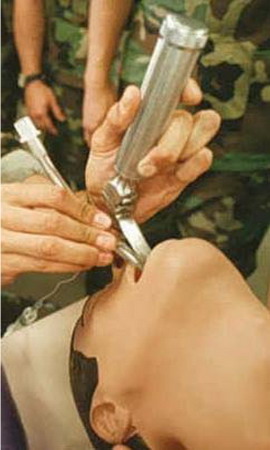
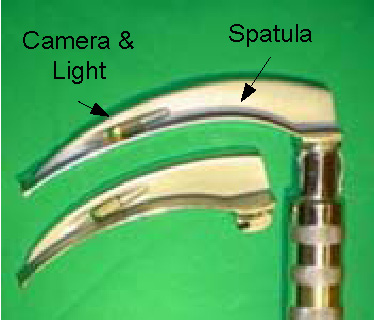
解决这些问题的一个方案是在压舌板的顶端嵌入一个微型相机,以扩大喉镜的视野范围 (图2)。目前市面上的这类系统中,微型相机是经由电缆与监视器相连接的,而这种电缆对于手术室或急救车而言的确是一大障碍。鉴于此,喉镜和相机之间若采用无线连接将会使操作更方便。要保证图像质量且避免失真,传输应该以数字方式进行。为了便于医生正确诊断,目标物的移动应该无延迟地出现在屏幕上,这意味着视频信号不一定会通过压缩电路或大量的层堆叠。由于这类仪器要求大带宽 (对与NTSC质量的图像为166Mbit/s) 和近场操作距离 (1~10m),所以 UWB正是理想的传输媒介。
相机架构
视频
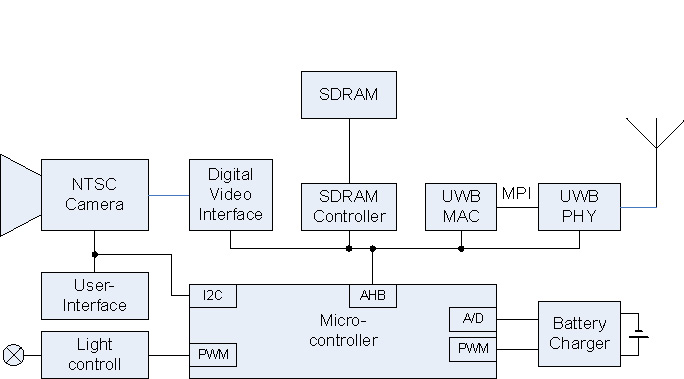
由于这个相机单元由电池供电,故必须尽量把功耗降至最小,以保证每次电池充电后系统的工作时间至少达2个小时。电池充电系统也由微控制器控制。
UWB流MAC的主要原理
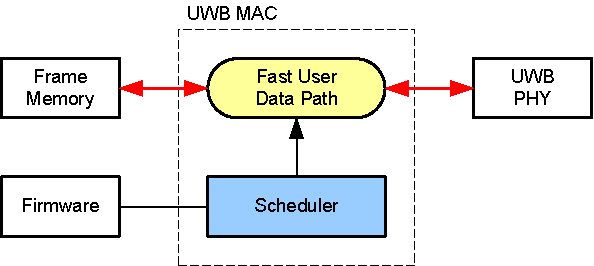
UWB 网络管理所需的用户数据 (主要是视频内容) 和图表都保存在存储器中。该存储器可以置于 MAC ASIC内部;也可以位于 MAC 器件之外。UWB MAC 利用同步数据流,把来自数据源的连续数据流传送到目的地 (
快速用户数据路径和调度器需要以硬件执行。固件除了提供典型的MAC层功能性之外,还可为点到点传输提供简单的链路控制功能性,比如断开与显示器的连接以及规定所需的带宽。
固件信标处理
UWB 传输会被组织成为多个超帧 (super frame) (见图5),而每一个超帧也分为信标周期 (Beacon Period, BP) 和有效载荷。信标和有效载荷占用了超帧256个媒体访问时隙。
从信标周期结束开始,固件会处理接收到的信标,并计算下一个超帧中自己的信标。
图3显示了设备A和B在两个超帧期间的信标处理,图中水平轴为从左到右的时间线。两个设备都会在每个超帧的信标周期发送信标。在超帧 [n-1] 的有效载荷被发送期间,设备A的固件就会处理由设备B所发送的信标信息单元 (Beacon Information Element, IE)。当超帧 [n-1] 完成发送时,固件也完成了设备B的信息,并在超帧 [n] 中设备A的信标信息单元内出现。
由于 MAC 程序可被视为一个实时线程 (thread),因此与应用的通信使用了一个请求和响应队列。
图 4所示为设备 A 和 B 之间的一个通信周期。设备 A 的应用程序发出请求,然后其固件在 SF [n-1] 内产生信标 IE 请求,接着,该请求便在 SF[n] 的 BP 内被发送。设备 B 接收到这个信标并计算它在数据周期 SF[n] 的答案。最后,设备 A就可以解释 (interpret) SF[n+1] 接收到的信标。
实现方案
概述
由于这种设备是电池供电的,因此功耗是一个大问题。如“相机架构”一节所述,MAC 的架构需要调度器和微控制器之间紧密连接。CMOS传感器由I2C总线控制,而
下面一节将介绍适合爱特梅尔CAP架构的UWB MAC实现方案。这款UWB MAC采用了用户金属可编程模块实现,通过一个6层AHB阵列与ARM9 AHB连接。
为了充分利用价廉的大容量存储器,数据和UWB管理 (见“UWB 流 MAC 的主要原理”一节) 所用的 RAM 位于 CAP 外部,通过 EBI 接口连接。对此,CAP9 架构的多层 AHB阵列可提供极好的支持,它允许 AHB 总线主控设备在金属可编程模块中实现。当经由外部总线接口 (EBI) 从外部的大容量存储器存取数据时,MAC 就成为总线主设备。对于不能延时存取的存储器,比如信标帧产生,便会使用CAP上的 SRAM。