基于ADSP2BF533 的图像匹配处理机的硬件平台设计
摘 要: 图像匹配处理机是目标识别系统的重要组成部分,是机器人视觉系统的核心技术,在现代信号处理特别是图像处理中占有重要地位。本文提出了以ADSP2BF533 作为核心处理器并配以外围器件SDRAM、Flash 和双端口
RAM 组成图像匹配处理机的硬件方案。本文对该硬件设计方案进行了详细分析和论述,并给出了硬件总体实现框
图。该处理机硬件系统结构简单,实时性好,可靠性高。实验结果证明,本系统完全可以实时可靠地完成图像匹配任务。
关键词: ADSP2BF533 ; 图像处理; 图像匹配
0 引 言
图像匹配是目标识别系统实现的核心技术,广泛应用
于机器人视觉。它将现场采集的实时数据与事先预存的
基准数据进行匹配,提取客观环境的信息并加以处理和理
解,以用于最终的监测、测量和控制。我国视觉机器人的
应用以提高劳动生产率,改善产品质量为主要目标,因此
实时性和可靠性是图像匹配的关键[ 122 ] 。
本文根据实际需要,选用ADI 公司的基于微信号体系
结构的Blackfin 系列ADSP2BF533 作为核心处理器设计
图像匹配系统的硬件实现平台[ 324 ] 。与采用专用图像处理
芯片的方案比较,本方案具有成本低,硬件结构简单的优
势,而且由于采用软件实现全部匹配算法,本方案具有修
改灵活和可升级性好的优点。
1 硬件平台设计
图像匹配处理机由主控制器及其相应的外围芯片组
成,包括SDRAM、Flash ,以及双端口RAM。其硬件总体
框图如图1 所示。
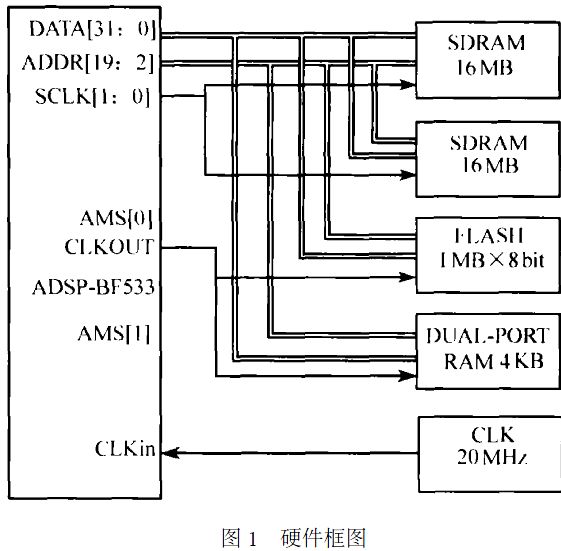
其中SDRAM 用于存储实时图像数据
和中间数据, Flash ROM 用于固化程序和实现程序的自
举,双端口RAM 用于和上位机进行通信。
1. 1 Flash 的设计与连接
为了使系统能够脱机独立运行必须把程序固化到系
统里,而且基准待配数据在断电后不能丢失,因此采用了
现场可编程可擦除的Flash 作为存储基准数据及运行程序
的媒介, 这样可以在系统上电后把程序及数据装入
SDRAM 实现高速存取。
本系统选用1 MB 的Flash 并把它挂在异步存储器选择
AMS [0]下,这样它占用的地址空间为以地址0x2000 0000
为起始的64 MB。ADSP2BF533 提供了4 种上电复位后从
外部存储器实现自举的方法,通过设置芯片管脚BMODE
[2 :0 ]来设定引导模式,本系统选择使用启动ROM ,从8
位Flash 启动的模式,此时,BMODE [ 2 :0 ]设置为“001”。
因为系统的自举要求Flash 的数据宽度为8 bit ,所以Flash
选择为1 Mbit ×8 的Flash MEMORY VE28F008[ 5 ] 。
1. 2 SDRAM的设计与连接
系统采用SDRAM 在系统运行时存储实时图像数据,
基准数据以及程序代码。由于Flash 的存取比较慢, 在
Flash 里存储的基准数据及程序代码,在系统初始化的时
候应预先搬到更快的存储器里面以便DSP 能不受存储器
读取时间的制约,充分发挥其高速的性能。ADSP2BF533
支持与SDRAM 的无缝接口, 最多可接4 个标准的
SDRAM 块,整个SDRAM 的最大容量可达512 MB ,这里
配置为2 块32 MB 的SDRAM。
1. 3 双端口RAM的设计
图像匹配处理机除了要进行实时匹配外,还要实现和
上层控制系统通信,用来传输实时采样数据和传回匹配结
果。本系统选用idt7143[ 6 ] 并把它映射为异步存储器模块,
挂在AMS [1 ]上,这样,它占据0x2400 0000 的64 MB 地
址空间。
1. 4 时钟管理与JTAG接口
ADSP2BF533 的输入时钟CL KIN 提供所需的时钟频
率,循环周期和稳定性。CL KIN 通过片内可编程锁相环精
确倍频,输出时钟信号即为内核时钟CCL K,CCL K按一个
可编程的分频比分频后产生系统时钟SCL K,为外部总线
提供运行频率。
通过对一个可编成的状态寄存器PLL_CTL 进行编程
控制PLL 的运行。
设置MSEL [6 :0 ]定义输入时钟(CL KIN) 对内核时钟
(CCL K) 的倍数, 此处定义为“01110100 ”, 使CCL K 为
CL KIN 的20 倍,系统内核工作在400 MHz 的工作频率。
设置SSEL [1 :0 ]定义内核时钟(CCL K) 对系统时钟
(SCL K) 的分频比,此处定义为“10”,使CCL K为SCL K的
3 倍,总线时钟工作在133 MHz 的频率上。
ADSP2BF533 提供一个IEEE 1 149. 1 J TA G 访问端
口,与专用仿真器相连接,供用户进行程序调适机进行硬
件仿真。
2 实 验
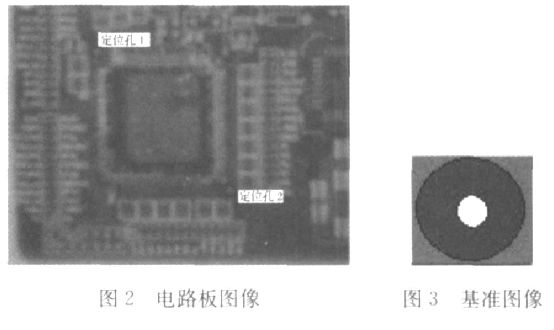
本文设计以下实验验证处理机的匹配速度及准确度。
在所设计的硬件平台上编写软件处理程序,采集电路板图
像,寻找定位孔所在位置,电路板图像如图2 所示,定位孔
位于图中标注2 处位置。基准图像的放大图如图3 所示,
配准后给出定位孔的横、纵坐标所在位置,以误差在一个
像素以内为匹配成功,实验结果,在100 次相同或不同电
路板图像的匹配结果中,匹配成功率为100 % ,匹配时间为
0. 12 秒/ 次。
3 结 论
本文所设计的以ADSP2BF531 为核心处理器的图像
匹配处理机,结构简单紧凑、可靠性高、实时性好,实验证
明,该图像匹配处理机的计算速度完全能满足图像匹配的
实时性要求。本系统所有匹配算法由软件实现,可升级性
好,是实现图像匹配功能的理想平台。
相关推荐
在线研讨会
焦点