一种基于TMS320VC5416DSK 的有源噪声控制系统设计与实现
1 引 言噪声作为主要环境污染之一,是一个全世界都十分关注的环境问题. 目前,噪声控制的主要措施分为无源噪声控制( PassiveNoiseControl ) 和有源噪声控制(ActiveNoiseControl,ANC ) . 无源噪声控制采用吸声、隔声、使用消声器等被动噪声控制的方法,对中高频噪声的控制效较好,但对低频噪声的控制效果不明显. 有源噪声控制又称为有源声控制或有源消声[1] ,是根据声波相消性干涉原理,由次级声源产生与待抵消声源(初级声源) 声波幅度大小相等、相位相反的声波,从而实现相消性干涉,达到降低噪声的目的. 有源噪声控制对低频和窄带噪声有较好的控制效果.
2 系统结构及原理
单通道自适应有源噪声控制系统如图1 所示.整个系统由初级扬声器(初级声源) 、次级扬声器(次级声源) 、参考麦克风、误差麦克风和自适应控制器等组成.
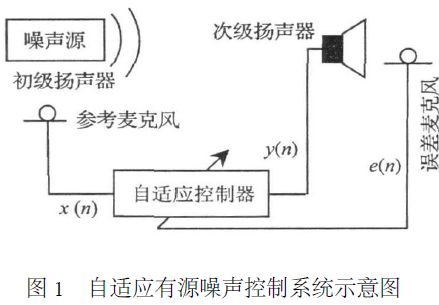
噪声源产生待抵消的噪声信号,被参考麦克风拾取,并作为参考信号x ( n) 输入至自适应控制器. 自适应控制器采用Filtered2XLMS 算法计算得到次级信号y ( n) ,经过功率放大器驱动次级扬声器. 初级扬声器和次级扬声器产生的声波分别形成初级声场和次级声场,两者在误差麦克风处发生相消性干涉后形成误差信号e ( n) ,被误差麦克风拾取后反馈到自适应控制器中,以控制自适应控制器权的更新.Filtered 2XLMS 算法通过调整控制器权系数而改变次级信号的幅度和相位,以使接收到的误差信号e ( n) 强度最小. 这样的更新过程不断进
行,直至系统达到稳定状态. 此时,Filtered 2XLMS算法收敛,残留误差信号e ( n) 强度最弱,则在误差传感器附近形成了一个静音区.下面三小节先阐述自适应控制和次级通路辨识的结构模型及原理,然后推导了噪声控制所采用的Filtered2XLMS 算法.
2.1 自适应控制器部分
自适应控制器是整个系统的核心部分. 自适应控制器采用Filtered2XLMS 算法输出次级信号y( n) ,其激励扬声器产生的声波与待抵消噪声声波y ( n) 在空间发生相消性干涉,从而在误差麦克风附近形成一静音区. 静音区的尺寸大小约为噪声信波长的十分之一[2] ,即噪声频率越低静音区尺寸就越大.图2 显示了自适应前馈控制器工作原理. 由VC5416DSK 构成的自适应滤波器采用Filtered2XLMS 算法,根据当前和过去时刻采样值预测下一时刻噪声信号样值,使得输出信号y ( n) 激励次级扬声器产生的干涉声波尽量与误差麦克风处的噪声声波的幅度大小相等、相位相反. 两声波在空间发生相消性干涉后被误差麦克风取并反馈给自适应控制器,该信号与参考麦克风拾取的参考信号x ( n) 一起控制Filtered2XLMS 算法的权值更新.由于该控制器是自适应的,它能自适应地调整权W, 以跟踪实际环境中噪声特性及声空间物理参数(如温度、气流速度等) 随时间的变化,从而在误差麦克风附近形成并保持一静音区.
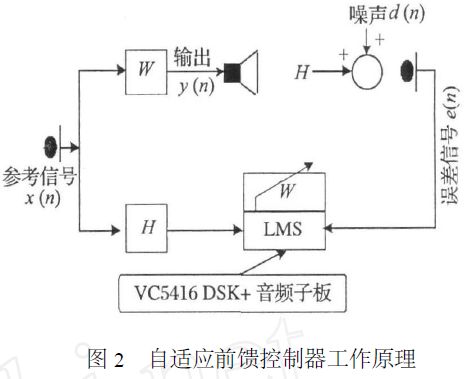
对一个单频信号,两个权的自适应线性组合器在权收敛后就可得到其等幅反相输出信号[3] . 本系统设计中,自适应滤波器阶数设为16 阶,可以控制多达8 个单频信号.
2.2 次级通路自适应辨识部分
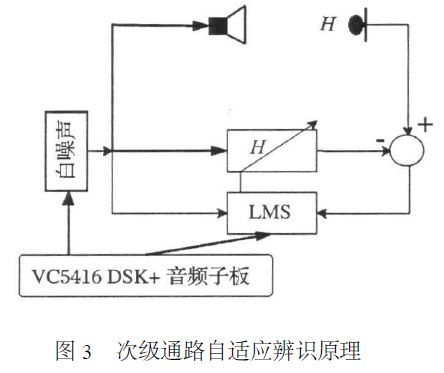
次级通路辨识是自适应有源噪声控制系统与信号处理中自适应噪声抵消系统的区别所在[1] .有源噪声控制系统中,次级声源产生的声波并不是立即被误差麦克风拾取,而是经过次级通路传播后再被拾取. 因此,次级通路对有源噪声控制系统的影响不容忽略,而对次级通路的辨识也是有源噪声控制中不可缺少的模块.图3 显示了次级通路自适应辨识原理.
VC5416DSP 产生一高斯白噪声通过次级扬声器输出,输出声信号被误差麦克风拾取后反馈给由VC5416DSK 构成的自适应滤波器. 滤波器采用LMS 算法,利用当前和过去时刻反馈信号样值和噪声信号样值,预测下一时刻误差麦克风接收到的信号样值. 系统进入稳态或自适应算法收敛后,滤波器权系数即为次级通路的传递函数的估计值.自适应滤波器阶数的选取主要取决于两个因素,即有源噪声控制系统所在房间的混响状况以及系统的采样率. 房间混响越严重,则所需滤波器阶数就越大. 同时,所需滤波器阶数还会随系统采样率的升高而增加. 本系统设计中,系统采样率设为8kHz, 实验所在房间混响属于中等程度,选取的滤波器阶数为256 阶.
3 硬件系统
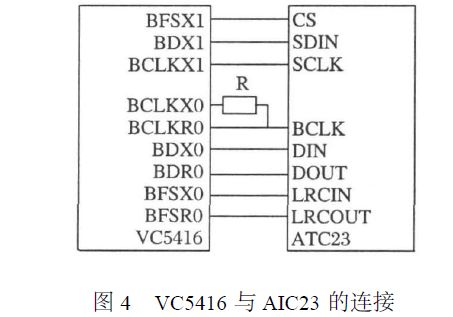
有源噪声控制硬件系统包含:VC5416DSK 、音频子板、作为初、次级声源的两台扬声器、作为参考、误差麦克风的两只电容式麦克风以及控制两麦风的调音台.VC5416DSK ( DSPSTARTERKIT) 是TI 公司为DSP 应用者开发的DSP 系统开成2 万条指令周期,能够满足该系统设计的实时性要求.有源前馈噪声控制系统需要两路信号(参考信号和误差信号) 同时输入. 在VC5416DSK 已有一CODEC 芯片基础上,我们通过板上的PeripheralInterface 扩展接口设计了一音频子板. 该子板我们选用了TI 公司生产的、集成了模拟功能的高性能立体声音频编解码器CODEC2TLV320AIC23 (简称AIC23 ) . 该子板的设计采用SPI 模式, 将VC5416 设为主设备,将AIC23 设为从设备,由主设备VC5416 提供时钟信号并控制数据传输过程.VC5416 与AIC23 的连接如图4 所示:
4 系统的软件实现
系统实现的软件部分主要由主程序和中断服务程序组成. 其中,主程序实现系统的初始化和程序模块控制等功能. 中断服务程序主要实现次级通路辨识(采用LMS 算法) 和噪声控制(采用Fil2tered2XLMS 算法) ,这两模块均需要实时处理. 本文设计中采用C 语言实现,并通过C54x 的内联函数[5] 进行了优化. 主程序流程图和中断程序流程图分别如图5 和图6 所示.在下面两小节中,将对图6 中次级通路辨识、噪声控制两模块的算法流程作详细阐述.
4.1 次级通路辨识的算法流程
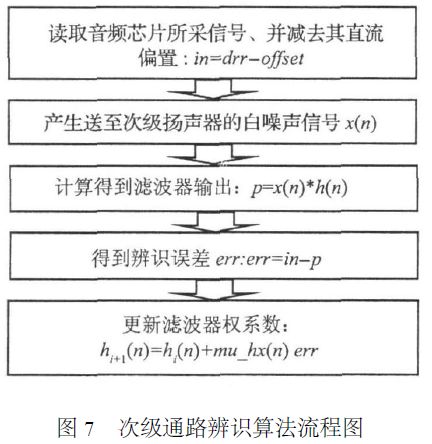
对DSP 和CODEC 等硬件模块初始化后,次级通路自适应辨识过程开始进行. 该自适应过程执行的迭代次数取决于自适应辨识过程收敛快慢. 经多次实验比较,迭代次数设为128000 次,且步长因mu - h 取为8000 (Q15 格式) 时,获得了较好的辨识结果. 需要注意的是,辨识过程中,麦克风所拾取信号电平幅度峰值应该控制在100mV 左右,这可通过对控制麦克风的调音台进行调节而实现. 次级通路辨识算法流程图如图7 所示:
4.2 噪声控制算法流程
噪声控制过程是整个算法流程的最后一个过程,也是有源噪声控制系统发挥其降噪功能的阶段. 该过程的算法( Filtered2XLMS 算法) 会一直运行,直至DSP 复位才会停止. 噪声控制算法流程图如图8 所示:

Filtered2XLMS 算法的步长因子mu - w 的值和误差麦克风所采信号的电平大小,将影响该过程噪声控制效果. mu - w 取较大值时会使收敛更快,但若取值过大又会导致算法的发散,并产生令人厌烦的发散噪声. mu - w 取值太小时,算法收敛速度会变慢,甚至不能跟踪噪声信号特征变化,影响噪声控制效果. 另外,若误差麦克风返回电平的幅度峰值太大,会使DSP 在运算过程中产生溢出. 经过多次实验比较,本文实验中mu - w 值取为12000(Q15 格式) ,误差麦克风返回信号电平的幅度峰值调节为100mV 左右.
5 实验结果及分析
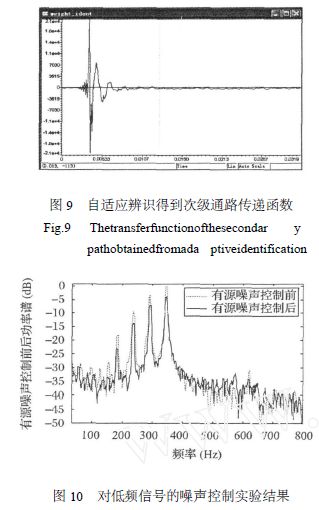
在本文的实验中,次级扬声器和麦克风距离设为30cm, 实验在一般普通的实验室中进行(即存在房间混响、反射和环境噪声等条件下) ,根据前面介绍的算法和相应的实验设置,得到的次级通路自适应辨识结果如图9 所示.实验中, 待抵消噪声设为含有180Hz 、235Hz、290Hz 、340Hz 四个低频范围内单频正弦波的噪声信号. 在有源噪声控制系统运行前后,由DSP通过误差麦克风分别采集5000 样本点噪声信号,采用基于Burg 算法的现代谱估计方法,分析它们功率谱得到了图10 所示结果. 由图10 可见,在四个频率点处均获得了4~5dB 的噪声控制效果.
本文介绍了在由VC5416DSK 、音频子板和麦克风等构成的硬件平台上,在一般普通的实验室中(即存在着房间混响、反射和环境噪声等影响) ,针对由多个单频正弦波构成的低频噪声信号,采用LMS 算法和Filtered2XLMS 算法分别实现了次级通路辨识和空间有源噪声控制,完成了自适应空间有源噪声控制实验. 实验结果表明,该系统获得了一定的噪声控制效果,对空间有源噪声控制系统的设计与实现具有一定的参考意义.
相关推荐
在线研讨会
焦点