基于高速DSP的雷达自适应检测
1 引言雷达的自动检测,通常是借助于与检测单元临近的距离或多普勒频率单元中的杂波加噪声的平均功率的估值来实现,本质上是一种自适应的门限检测。目前的经典检测理论主要是基于统计学中的假设检验的似然比检测。比如ML-CFAR,OS-CFAR等。雷达接收在不同的环境中使得背景变得不再均匀,雷达自身噪声、外界气候、多目标背景、各种环境的杂波、人为的干扰等使雷达检测的性能下降,需要一种既能自适应于干扰目标数和分布情况的变化,又可以自适应于杂波边缘位置变化的CFAR检测器。很多研究机构对自适应确定选择逻辑、算法和参数方面做了大量的研究。比如CCA-CFAR检测器、E-CFAR检测器、OSTA-CFAR检测器等,都是用在不同环境下的自适应检测器。
2 ML类CFAR检测器的基本原理
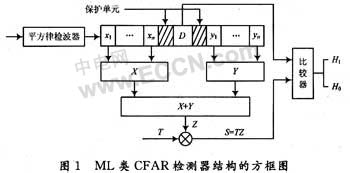
在均匀的噪声环境中,使用的是ML类CFAR检测器,根据门限的选定Pfa和Pd能够保持基本恒定。ML类CFAR监测器,通常是将检测单元周围的N个平方律求平均,平均值乘以一个标称化因子T得到该检测单元的检测阀值,在均匀的杂波背景中,这样检测得来的Pfa能够保持稳定,但是在多目标环境以及在干扰和杂波边缘环境下,检测阀值的变化很大,带来的Pfa也会增加很快,图1是均值ML类CFAR检测器的结构框图。
 |
3 E-CFAR自适应算法的基本原理
E-CFAR主要用于多目标环境和复杂杂波环境中提高检测性能。检测器把超过删除阀值的强采样从集合中删除掉,除了常规的检测门限,它还设立了一个删除门限,将检测单元中大于删除门限的平均律值做一个特殊处理,然后做平均处理,删除处理确保检测阀值的计算是基于一组删除了强干扰采样后的能够代表杂波功率水平的采样,检测器的结构方框图如图2所示,式(1)是Pfa的计算公式,式(2)是Pd的计算公式。
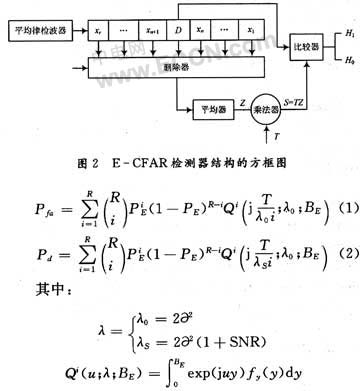 |
fy(y)是杂波低于BE时的条件概率密度;Qi(u;λ,BE)是其对应的条件特征函数;SNR是信噪比;2?2是杂波平均功率水平估计;BE是删除阀值幅度,R为背景单元个数。
4 实验仿真验证结果
数据来源于雷达记录仪录取的试验数据,采用平方律检波,得出回波的噪声图谱,共2组,分别代表在均匀背景、多目标环境下的回波。系统参数为:警概率Pfa=10-4,参考单元N=16个,保护单元设为2个。
第一组为在均匀杂波背景中的数据:
目标功率为72.67 dB,平均噪声功率为54.7 dB,根据最优检测理论,可以计算出固定门限为63.48 dB,INR/SNR=-6 dB,INR是删除门限和噪声的幅度比。
为便于画图和分析,只截取了目标附近的一段数据分别进行ML-CFAR和E-CFAR检测,得到的结果如图3所示。
 |
从图3中可知:超过最优检测阈值和活动门限阀值的回波只有一个单元,两种检测器的活动门限都超过了杂噪的功率,因此在均匀杂波背景下两种检测器的性能基本一致。
第二组为在多目标环境中的数据:
目标1功率为73.15 dB,目标2功率为93.5 dB,平均噪声功率为54.6 dB,根据最优检测理论,可以计算出固定门限为64.5 dB,取INR/SNR=-6 dB,图4是多目标附近数据的检测仿真图。图中两个目标的位置比较靠近,按照系统提出的参考单元个数,两个目标在检测过程中要对彼此产生影响。
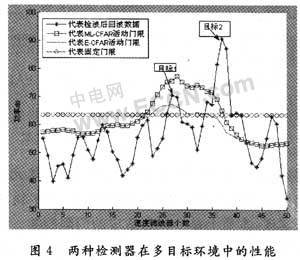 |
从图4中可以看出,使用ML-CFAR检测器时由于目标2对目标1的影响,抬高了目标1的活动门限而使目标1没有被检测出,E-CFAR由于做了删除处理,使目标1的活动门限下降了,同时将目标1和目标2都检测出来。
从数据仿真中得出,在均匀背景中两种CFAR检测器的性能基本一致,而在多目标环境中,如果选择合适的参数,E-CFAR的性能会好于ML-CFAR。
5 基于高速DSP的硬件选取和实现
5.1 高速DSP的选用
目前市场上有很多适用于实时高速信号处理的DSP芯片,有AD公司的TS系列,有TI公司的TMS6000系列,还有PowerPC处理器等。设计一个硬件系统,要考虑它的实际使用体积、浮点运算速度、内外总线速度、内存贮和外存贮的扩展能力、外接口的能力、功耗、DSP之间的相互链接、成本等因素,用这些实际工程运用的因素来综合评估如何选用适用的DSP器件。由于雷达信号处理的实时性,即在很短的时间内完成大数据量处理,使用单一的DSP已经不能满足要求,目前通用的DSP器件中,AD公司TS系列具有很强的拓扑能力,从运算速度和存贮量考虑,我们采用了TS201处理器作为实现自适应检测的芯片。
5.2 ADSP TS201S主要性能介绍
(1)高达600 MHz运行速度;
(2)24 Mb片内DRAM;
(3)双运算模块,PGBA封装;
(4)集成I/O口,14通道DMA,SDRAM控制器;
(5)通过共享总线可无缝链接多达8个DSP,相互连接时仅需很低的通讯开销;
(6)每个机器周期可以执行4条指令,24个16位定点运算和6个浮点运算;
(7)支持高级语言开发,有良好的软件开发环境。
5.3 自适应检测的算法拆解流程
自适应检测的算法拆解流程步骤如下:
(1)完成雷达回波的预处理和数据的积累。
(2)形成杂波图,并对杂波类型进行分析。
(3)完成CFAR类型的选择。如果是均匀的杂波取ML-CFAR检测器进行CFAR检测可以减少运算量;如果杂波分布比较复杂或者是多目标环境,选用E-CFAR检测器,可以提高检测概率。
(4)完成CFAR检测器的参数设置。根据雷达的系统指标(虚警概率、采样率、采样时间等)确定参考窗的大小和计算检测门限。ML-CFAR检测器要完成固定门限和活动门限的计算,E-CFAR还多一个删除门限的选定。
(5)完成整个系统的检测运算。
5.4 实现的硬件框图
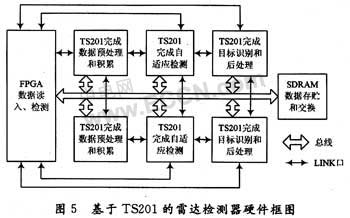
通过对大数据量的算法拆解,以及完成功能的实时要求,根据雷达的时间要求以及拆解后算法在TS201上的运行时间计算,我们用了6片TS201处理器、1片FPGA和2 Gb的SDRAM以及相应的适配器件组成了自适应检测系统。FPGA可完成雷达的工作方式控制,完成DSP的片选功能;FPGA,DSP,SDRAM之间互联的外总线速度可达75MHz64b,对于每个DSP链路口组合起来最高吞吐量可达1 Gb/s,高速大数据量的吞吐使它们之间的通讯自如。每个DSP之间的无缝链接方便了功能的增减和次序的调换。通过SDRAM大数据量的存贮,既为复杂功能的实现提供方便也为数据的实时监控提供可能。基于TS201的检框测图如图5所示。
 |
6 结 语
以上介绍了两种CFAR检测器的原理和工程实现框图,从数据分析中可以看出E-CFAR在复杂杂波环境中的检测性能有所提高,在实际的检测系统设计中可以增加一个杂波分析过程来判别使用那种检测器比较有效。