串级PID控制原理
串级计算机控制系统的典型结构如下图所示,系统中有两个PID控制器,Gc2(s)称为副调节器传递函数,包围Gc2(s)的内环称为副回路。Gc1(s)称为主调节器传递函数,包围Gc1(s)的外环称为主回咱。主调节器的输出控制量u1作为副回路的给定量R2(s).
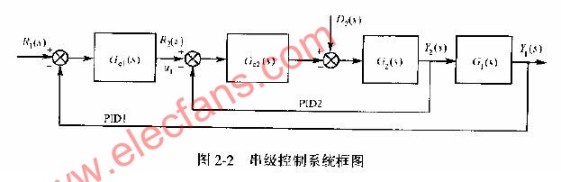
串级控制系统的计算机顺序是先主回路(PID1),后副回路(PID2)。控制方式有两种:一种是异步采样控制,即主回路的采样控制周期T1是副回路采样控制周期T2的整数倍。这是因为一般串级控制系统中主控对象的响应速度慢、副控对象的响应速度快的缘故。另一种是同频采样控制,即主、副回路的采样控制周期相同。这时,应根据副回路选择采样周期,因为副回路的受控对象的响应速度较快。
串级控制的主要优点:
1、将干扰加到副回路中,由副回路控制对其进行抑制;
2、副回路中参数的变化,由副回路给予控制,对被控制量Gc1的影响大为减弱;
3、副回路的惯性由副回路给予调节,因而提高了整个系统的响应速度。
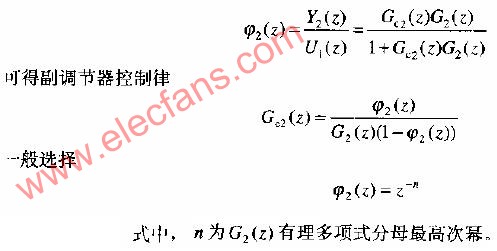
副回路是串级系统设计的关健。副回路设计的方式有很多种,下面介绍按预期闭环特性设计副调节器的设计方法。
由副回路框图可得副回路闭环系统的传递函数为:
相关推荐
在线研讨会
焦点