数字式MEMS加速度传感器在倾角测量的应用
2.2软件设计
由于前面算法所述,系统硬件电路中,由于所选用芯片的测量方法的缘故,电路板的两条互相垂直的边应与平面成45度角,但实际却很难保证45度角,故首先应测试其实际角度,并将该角度存入寄存器中,在后面的应用中,可以将初始数据做为基准,进行测试以确保角度计算的准确性。初始数据标定在设计中采用自恢复按键脉冲触发单片机的中断调用来实现。在本设计中,按照如图2所示的流程编程实现了车辆在行驶过程中的微小角度的测量以及其他辅助功能的实现。
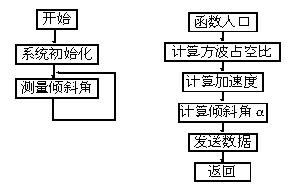
图2 计算程序流程图
3 数据与结论
通过以上的硬件和软件设计后,最终实现了整个系统功能,并进行了一系列的实验。根据实际情况,在实际中,采用适当的滤波电容,带宽为5Hz,噪声约为0.43mg,Rs阻值设置为
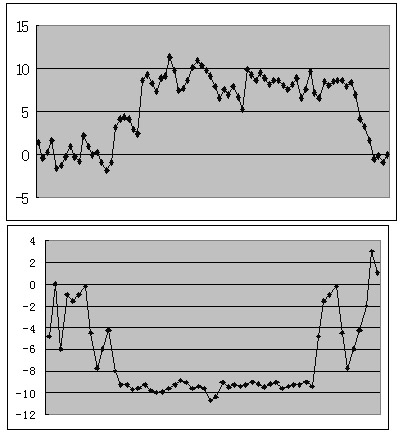
图3 上下坡角度实测图
参考文献
[1]李华.MCS-51系列单片机实用接口技术[M].北京航空航天大学出版社,1993.
[2]沙占友.集成化智能传感器原理与应用[M].电子工业出版社,2004
相关推荐
在线研讨会
焦点