一种数控DC电流源的设计与实现
系统软件设计在凌阳十六单片机应用开发工具unSPIDE
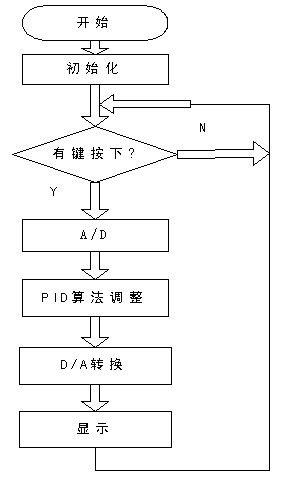
图5 主程序流程图
A/D转换部分程序主要用于将采样电阻采到的模拟电压信号转换为数字信号。采样信号由IoA6输入并直接送入缓冲器P_ADC_MUX_Data,在ADC自动方式被启用后,会产生一个启动信号,此时,RDY=0,DAC0的电压模拟量与外部的采样模拟比较,以尽快找出外部信号模拟量的数字量,A/D转换的结果保存在SAR内。当10位A/D转换完成时,RDY=1,此时,通过读P_ADC_MUX_Data单元可以获得10位A/D转换的数据。其IRQ1 中断服务程序的流程图如图6所示。
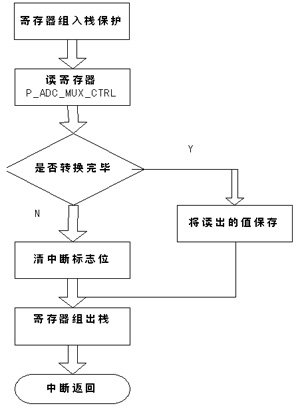
图6 IRQ1中断服务程序的流程图
PID算法程序主要用于修正实际输出的电流值和设定值的偏差,调节下一次的输出值,使输出更接近于设定值,提高精度。具体控制过程为单片机经A/D芯片读出实际电流Ik,然后和设定的电流Is比较,得出偏差值Ek=Is-Ik,单片机根据Ek的大小,调用PID公式,计算出本次电流调节的增量Δik,然后根据前一次的D/A转换后输出电流Iq-1,计算出本次电流的输出Iq。
离散增量PID的计算公式为
ΔIk=Kp[(Ek-Ek-1)+K1Ek+KD(Ek-2Ek-1+Ek-2)]
=Kp(Ek-Ek-1)+K
式中,K
为了测试系统运行的准确性和可靠性,将设定量与反馈量的进行测试对比,误差在0.01%之内,并且运行稳定,达到了预期目的,还增添了特色的音频播放设计。